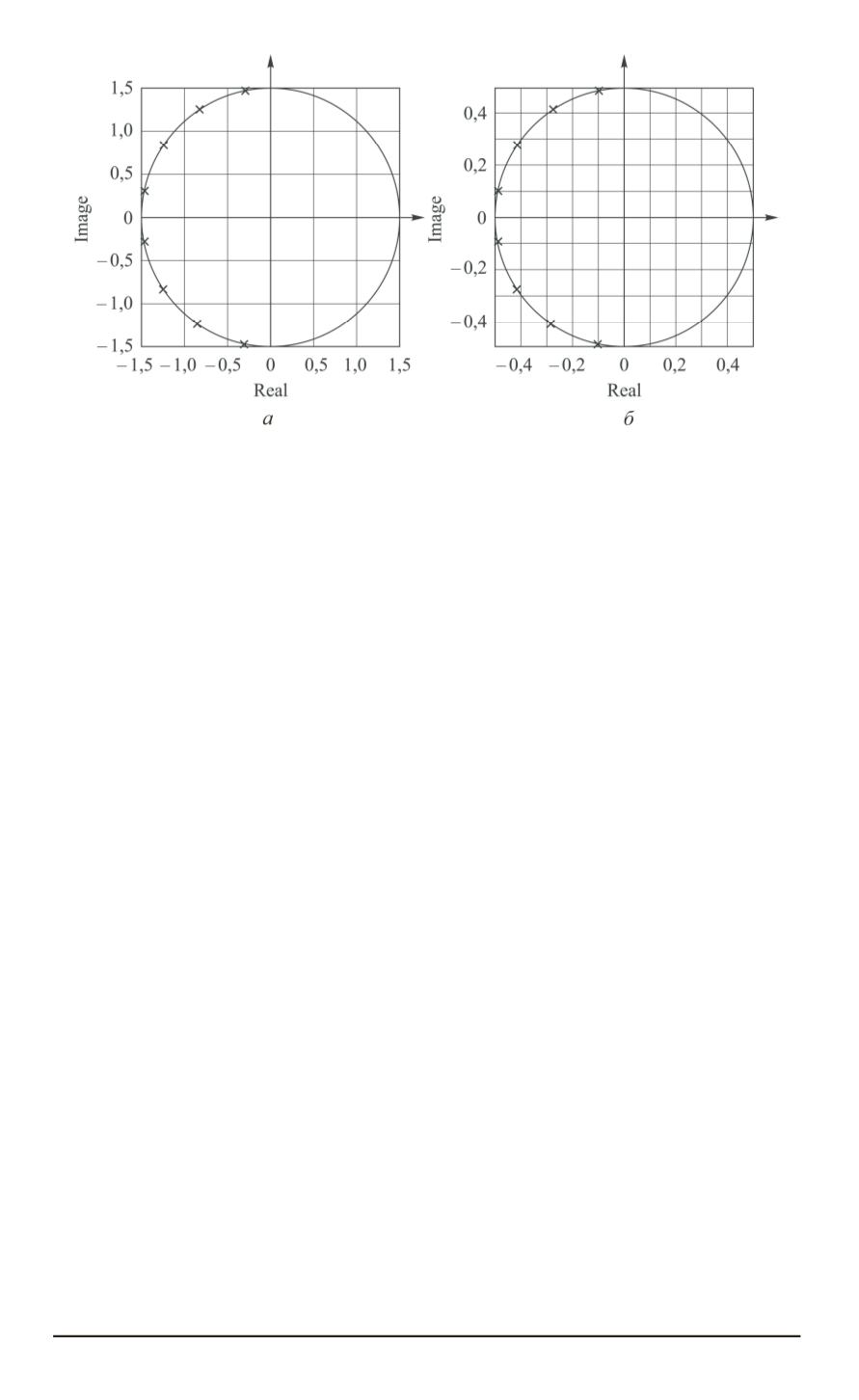
Рис. 3. Расположение корней эталонного полинома Баттерворта на комплексной
плоскости для построения адаптивного наблюдателя (
а
) и регулятора (
б
)
W
p
=
0
,
7508 0
,
9949
−
0
,
0664
−
0
,
0021
−
0
,
6899 0
,
5012
−
0
,
1119
−
68
,
1355
0
,
1131 0
,
0019 0
,
7876 0
,
9940
0
,
0485 68
,
1753
−
0
,
6704 0
,
5233
−
16
,
4562
−
1
,
3974
−
15
,
2103 0
,
5080
17
,
9184
−
0
,
9926 27
,
1065
−
67
,
7065
16
,
9256
−
0
,
4940
−
15
,
8974
−
1
,
3921
26
,
7090
−
67
,
7344 18
,
2892
−
1
,
0343
.
Подставляя полученные числовые значения матриц в математическую
модель объекта управления, проведя математическое моделирование
режима активного демпфирования колебаний пленочного диска сол-
нечного паруса, получаем следующие зависимости основных параме-
тров вектора состояния (рис. 4–6).
Выведение и удержание МКС в положении динамического рав-
новесия.
Описание системы координат. Уравнения движения.
В ка-
честве системы координат используется система LVLH (Local Vertical –
Local Horizontal). В данной системе началом координат является центр
масс объекта управления, ось
OX
направлена вдоль вектора орби-
тальной скорости, ось
OZ
против радиуса-вектора из центра Земли в
центр масс объекта управления, ось
OY
дополняет систему координат
до правой тройки (рис. 7). В качестве связанной системы координат
будем использовать систему ISS, оси которой совпадают с основными
осями инерции объекта.
Динамика объекта управления, в данном случае МКС, описывается
следующими уравнениями.
50 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


