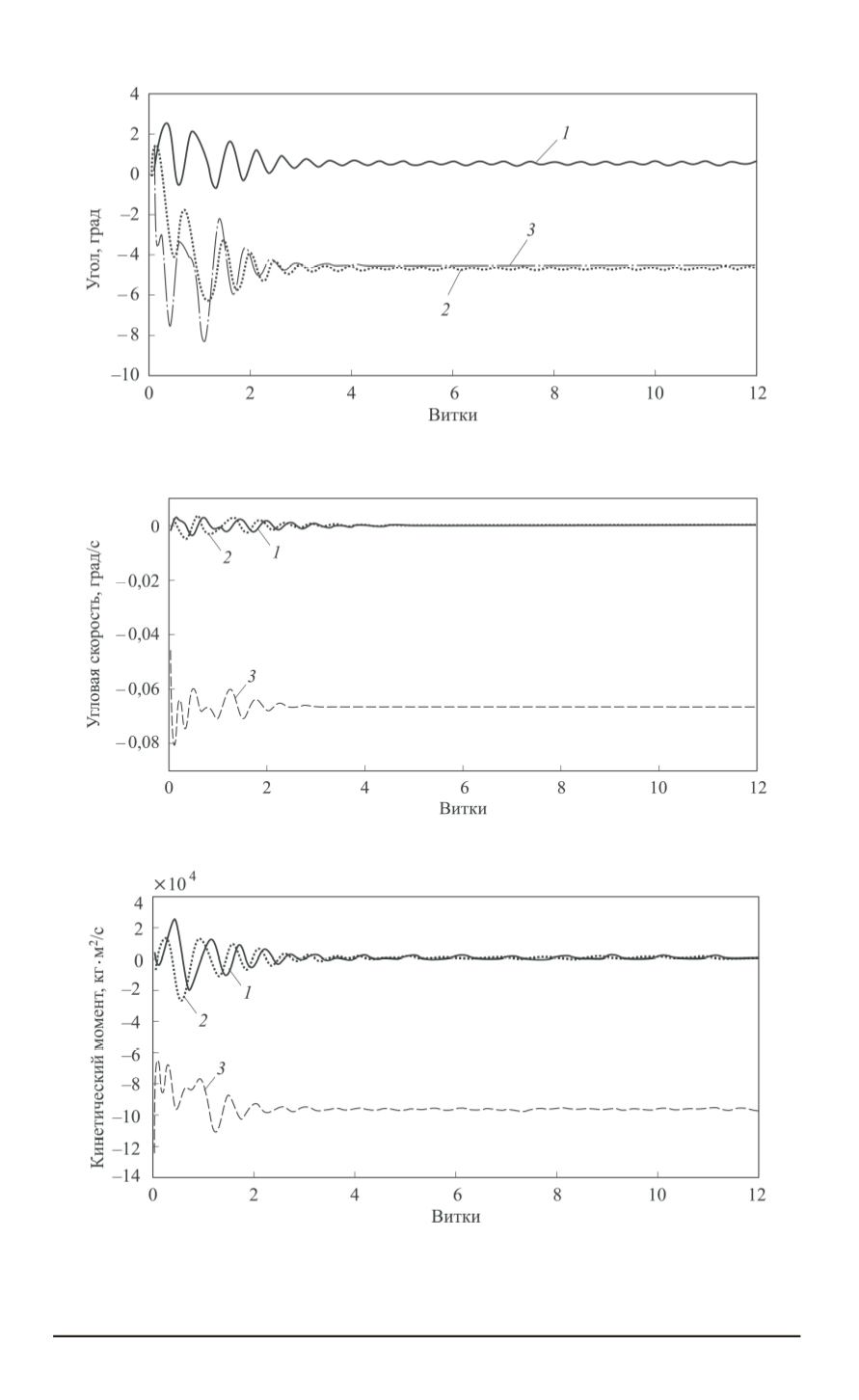
Рис. 9. Угловое положение МКС по каналам крена (
1
), рысканья (
2
) и танга-
жа (
3
)
Рис. 10. Угловая скорость МКС по каналам крена (
1
), рысканья (
2
) и тангажа (
3
)
Рис. 11. Кинетический момент по каналам крена (
1
), рысканья (
2
) и тангажа (
3
)
56 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


