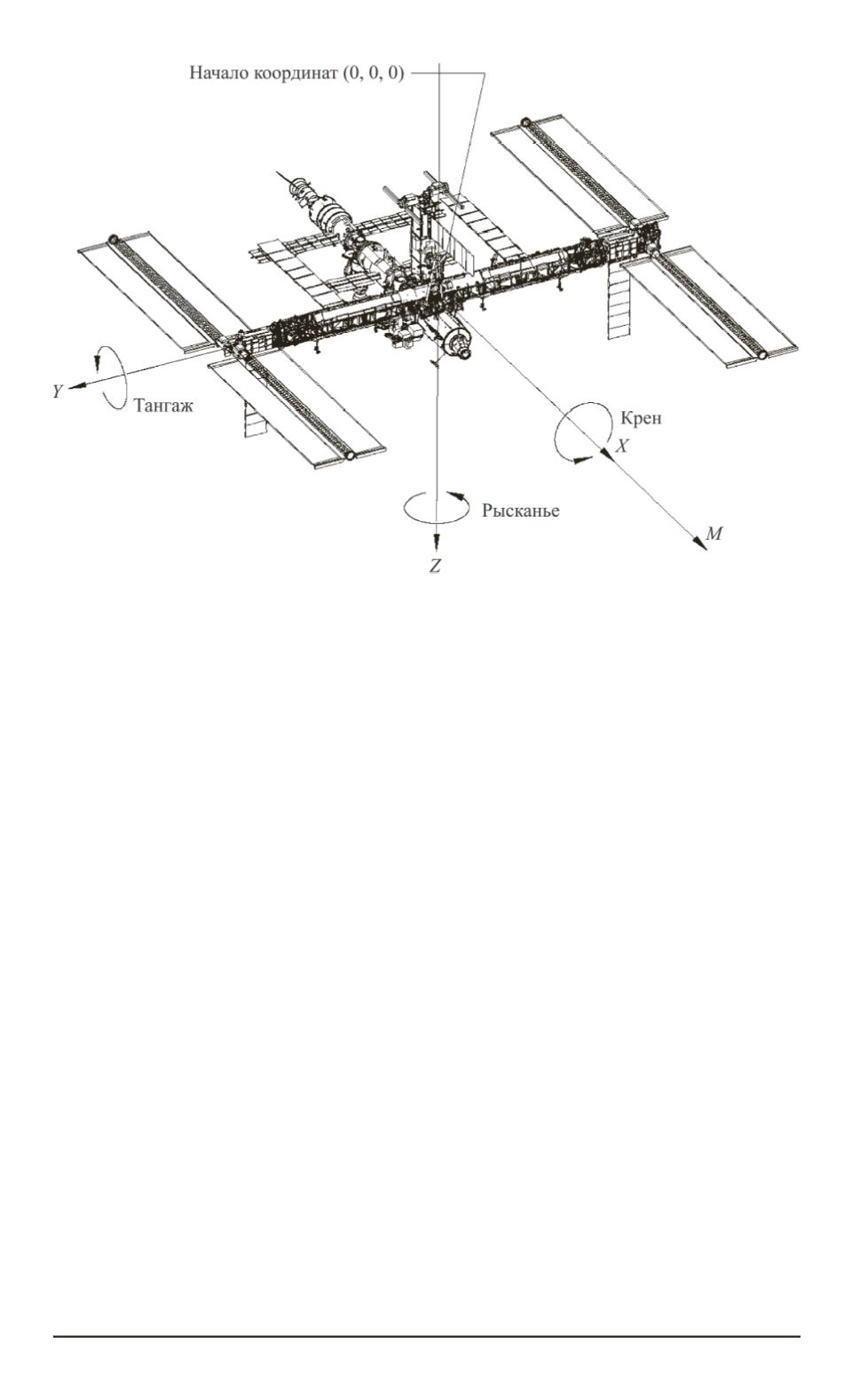
Рис. 7. Система координат LVLH
2. Кинематическими соотношениями в кватернионном виде:
2 ˙N
e
i
= N
e
i
◦
(
ω
abs
)
e
−
(
ω
0
)
i
◦
N
e
i
,
(16)
где
N
e
i
— кватернион разворота из базиса
i
в базис
e
(
i
— орбитальный
базис,
e
— связанная система координат, оси которой расположены
вдоль главных осей инерции КА),
(
ω
abs
)
e
= 0
ω
x
ω
y
ω
z
T
—
вектор абсолютной угловой скорости в проекциях на связанный базис,
(
ω
0
)
i
= 0 0 0
ω
0
T
— вектор угловой скорости приборного базиса
в проекциях на орбитальную систему координат [19].
Проэцируя (1) и (2) на связанный базис, применяя теорему об из-
менении кинетического момента отдельно к корпусу МКС и отдельно
к маховикам, получаем систему из шести уравнений, описывающих
динамику объекта управления [20]:
J
x
¨
γ
= 4
ω
2
0
(
J
z
−
J
y
)
γ
+
ω
0
(
J
x
−
J
y
+
J
z
) ˙
ψ
−
u
x
;
J
z
¨
ψ
=
ω
2
0
(
J
x
−
J
y
)
ψ
−
ω
0
(
J
x
−
J
y
+
J
z
) ˙
γ
−
u
z
;
J
y
¨
ϕ
= 3
ω
2
0
(
J
z
−
J
x
)
ϕ
−
u
y
;
˙
h
x
=
h
z
ω
0
+
u
x
;
˙
h
z
=
−
h
x
ω
0
+
u
z
;
˙
h
y
=
u
y
,
где
γ
,
ψ
,
ϕ
— соответственно углы разворота по каналам крена, рыска-
нья и тангажа:
J
x
,
J
y
,
J
z
— моменты инерции МКС относительно
52 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


