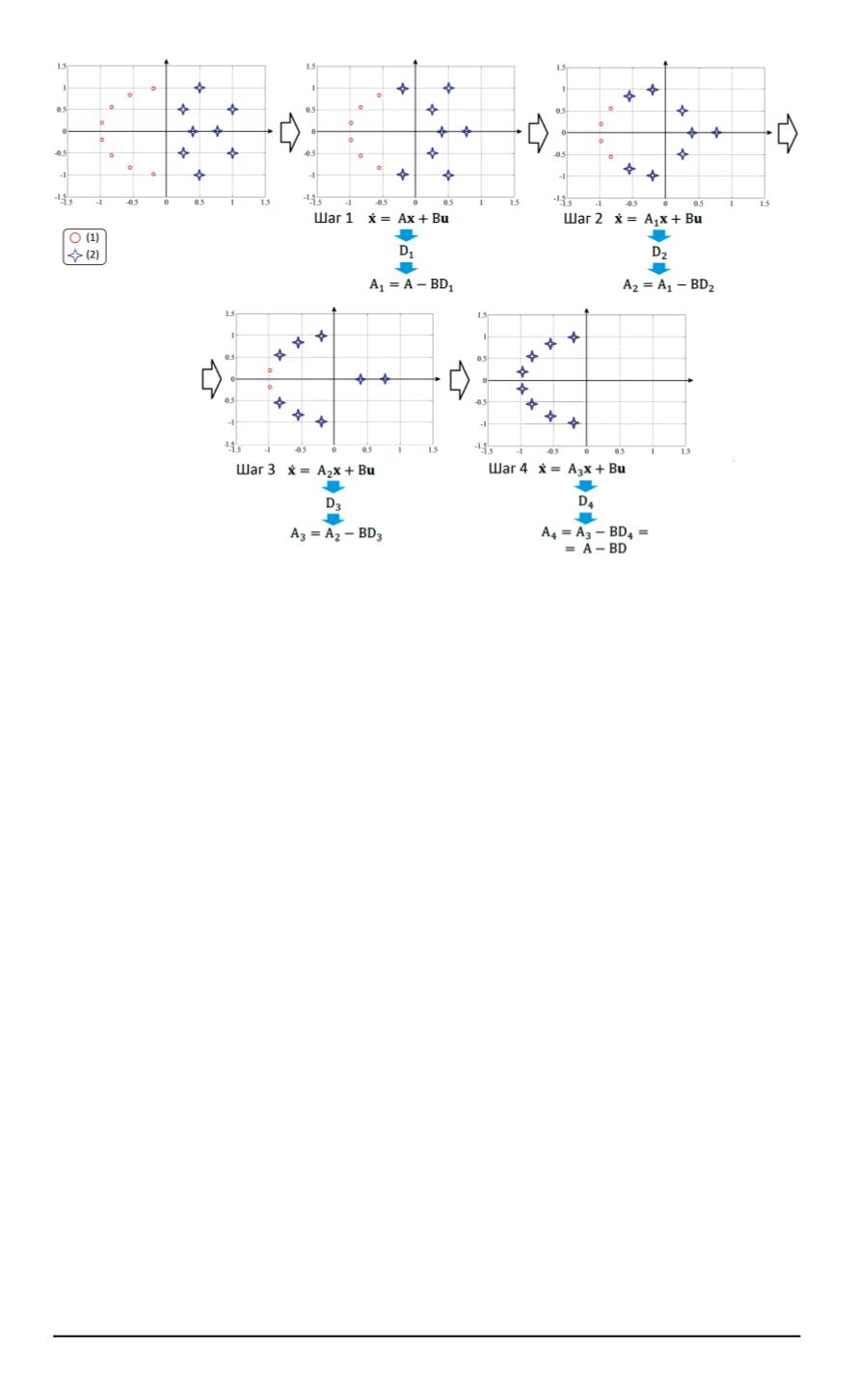
Рис. 1. Графическая иллюстрация метода последовательных замыканий:
0 — эталонное расположение корней замкнутой системы; + — расположение корней
матрицы переходных состояний на
i
-м шаге
Подробно опишем метод последовательного замыкания на примере
построения регулятора для линейной динамической системы. Рассмо-
трим систему, описывающуюся следующим уравнением:
˙x = Ax + Bu
,
(1)
где
x
—
n
-мерный вектор состояния динамической системы (1);
u
—
m
-мерный вектор управления;
A
— матрица системы размером
n
×
n
;
B
— матрица управления размером
n
×
m
.
Пусть данная система является полностью управляемой по крите-
рию Калмана, т.е. ранг матрицы управляемости будет равен размерно-
сти вектора состояния [14]:
rank
B AB A
2
B
. . .
A
n
−
1
B =
n.
Зададим эталонное расположение корней характеристического по-
линома замкнутой системы
{
λ
1
, λ
2
, . . . , λ
n
}
.
(2)
Цель — поиск такой обратной связи
u =
−
Dx
, которая бы обеспе-
чивала характеристическому полиному
|
A
−
BD
−
λ
I
|
= 0
замкнутой
системы эталонное расположение корней (2).
Подробнее рассмотрим замыкание первой моды движения сис-
темы (1).
42 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


