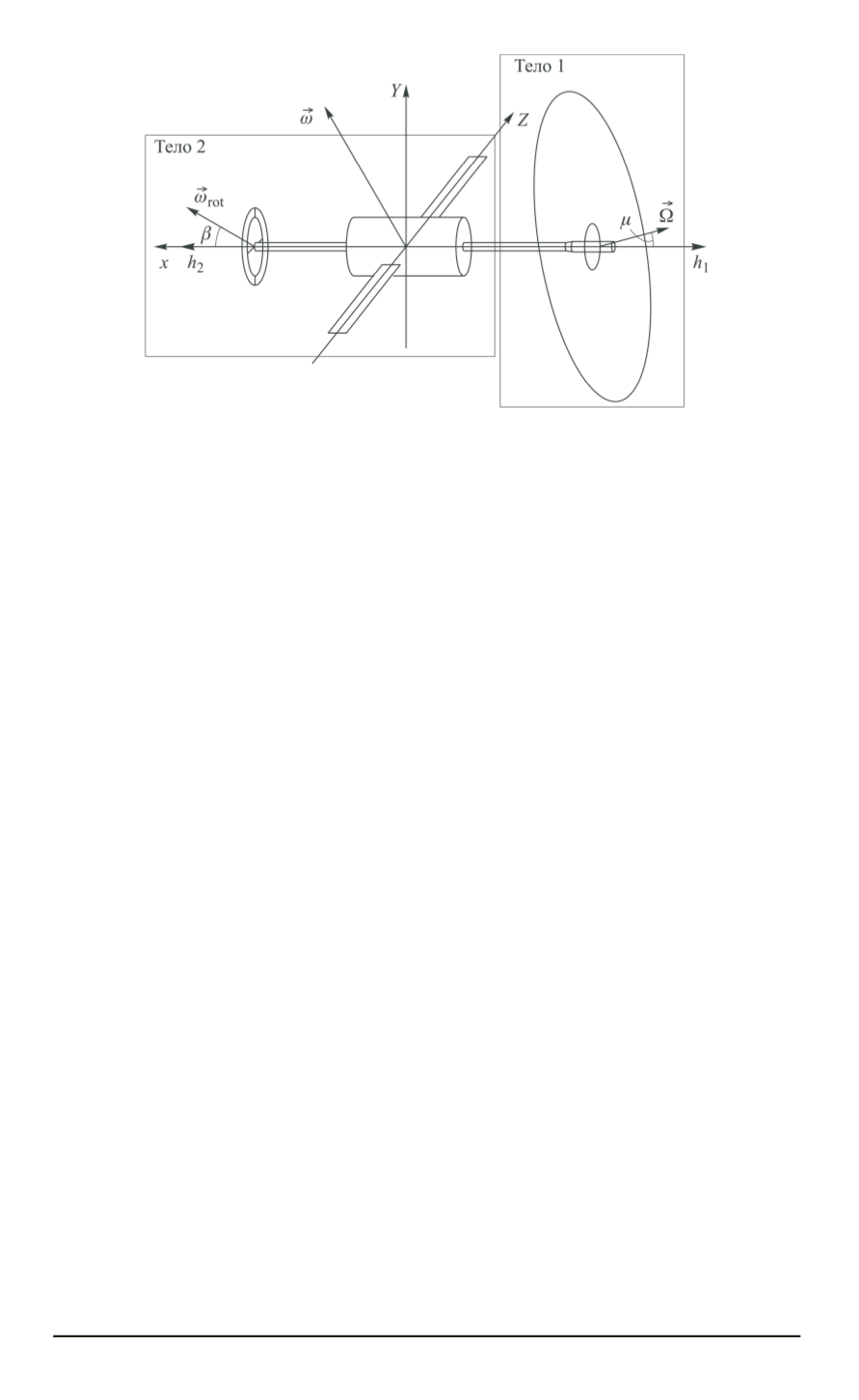
Рис. 2. Динамическая схема объекта управления
Внутренний карданов подвес обладает управляемыми и контролируе-
мыми углами поворота, что позволяет отклонять ось вращения рото-
ра гироскопа от оси вращения центральной жесткой вставки паруса
для создания управляющего гироскопического момента. Центральная
вставка выполнена в виде вантовой конструкции и служит для пере-
дачи момента импульса солнечного паруса приборному отсеку [15].
Введем систему координат
OXY Z
так, чтобы оси координат были
связаны с осями чувствительности датчиковой аппаратуры (рис. 2).
Ось
OX
направим в сторону вращения ротора силового гироскопа,
ось
OY
будет лежать в плоскости вращения центральной вставки, а
ось
OZ
будет дополнять систему координат до правой тройки [15].
Уравнения движения.
Для описания динамики объекта управле-
ния разобьем его на два тела: первое — солнечный парус; второе —
приборный отсек с силовым гироскопом в подвесе Гука (см. рис. 2).
Рассмотрим первое тело. Ранее было доказано, что 99,9% массы
мембранного диска солнечного паруса совершают колебания на пер-
вых двух гироскопически связанных модах движения, поэтому дина-
мическое поведение солнечного паруса с большой степени точности
можно представить динамикой одного гироскопа в упругом подвесе
[15]. Исходя из этого, кинетический момент первого тела будет выгля-
деть следующим образом:
h
1
= M
T
J
1
(Ω +M
ω
)
,
где
M =
1
−
μ
z
μ
y
μ
z
1
−
μ
x
−
μ
y
μ
x
1
— матрица малого поворота векто-
ра угловой скорости;
J
1
=
A
0 0
0
C
0
0 0
C
— приведенный момент
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5 45


