A
ϕ
=
0 1 0 0 0 0 0 0 0 0
M
y
0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 1 0 0 0 0 0 0 0
0 0 0 0 0 1 0 0 0 0
1 0 0 0
−
ω
2
0
0 0 0 0 0
0 0 0 0 0 0 0 1 0 0
1 0 0 0 0 0
−
4
ω
2
0
0 0 0
0 0 0 0 0 0 0 0 0 1
1 0 0 0 0 0 0 0
−
9
ω
2
0
0
; B
ϕ
=
0
−
1
/J
y
1
0
0
0
0
0
0
0
.
Здесь для упрощения записей введены следующие обозначения:
G
x
= 4
ω
2
0
(
J
z
−
J
y
)
/J
x
,
H
x
=
ω
0
(
J
x
−
J
y
+
J
z
)
/J
x
,
G
z
=
ω
2
0
(
J
x
−
J
y
)
/J
z
,
H
z
=
ω
0
(
J
x
−
J
y
+
J
z
)
/J
z
,
M
y
= 3
ω
2
0
(
J
z
−
J
x
)
/J
y
.
Поиск матриц обратной связи.
Для придания асимптотической
устойчивости объекту управления введем обратную связь:
u
γψ
=
−
D
γψ
x
γψ
;
u
ϕ
=
−
D
ϕ
x
ϕ
для систем крен–рысканье и тангажа соответственно. В результате
уравнения, описывающие КА в пространстве состояний, приобретут
следующий вид:
˙x
γψ
= (A
γψ
−
B
γψ
D
γψ
)x
γψ
;
˙x
ϕ
= (A
ϕ
−
B
ϕ
D
ϕ
)x
ϕ
.
В качестве эталонного характеристического полинома для матрицы
(A
−
BD)
возьмем полином Баттерворта с частотой среза
2
ω
0
[18].
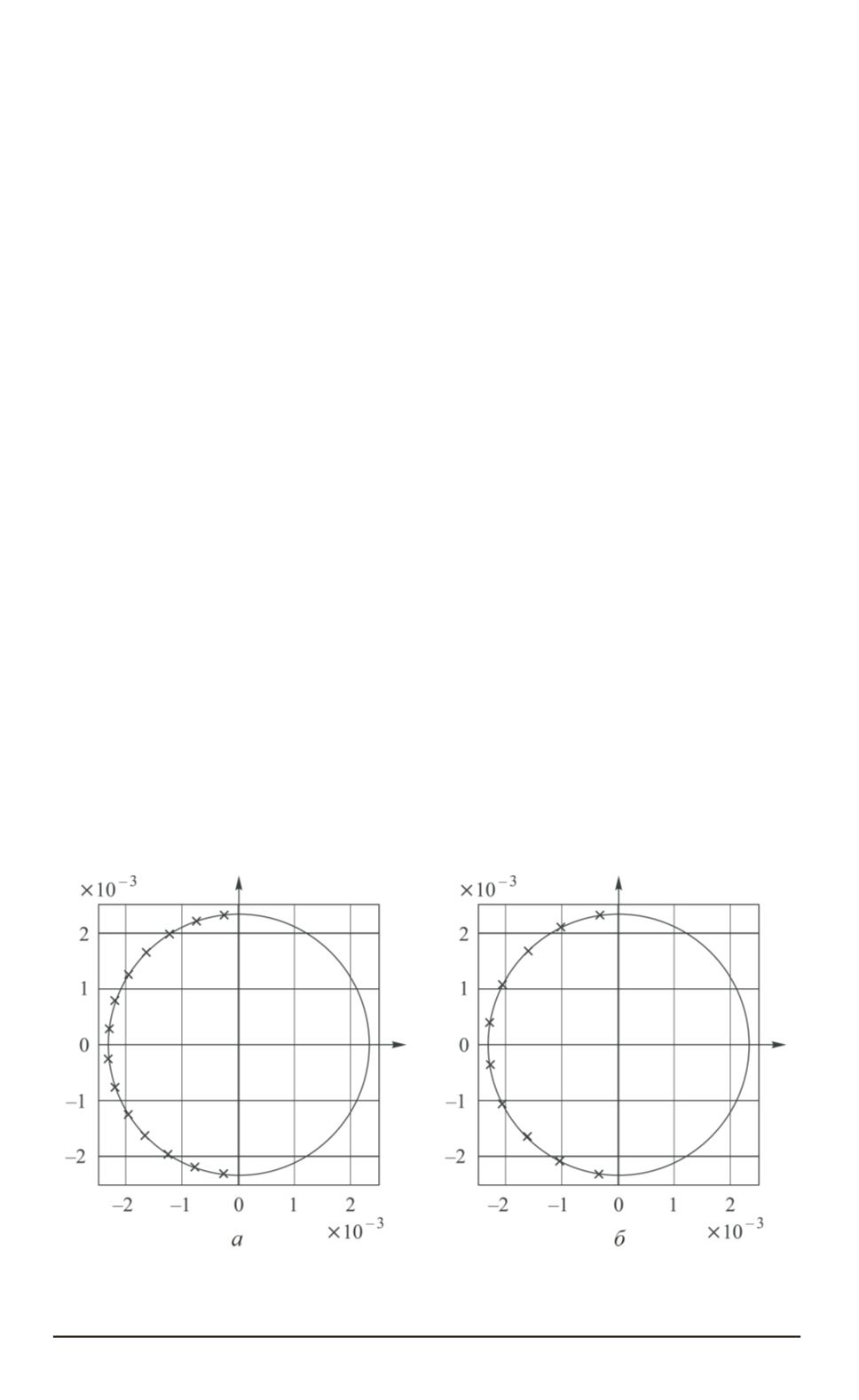
Очевидно, что для системы крен–рысканье полином Баттерворта будет
иметь 14 порядок, для системы тангажа — 10 порядок (рис. 8).
Рис. 8. Расположение корней эталонного полинома Баттерворта для системы
крен–рысканье (
a
) и для системы тангажа (
б
)
54 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


