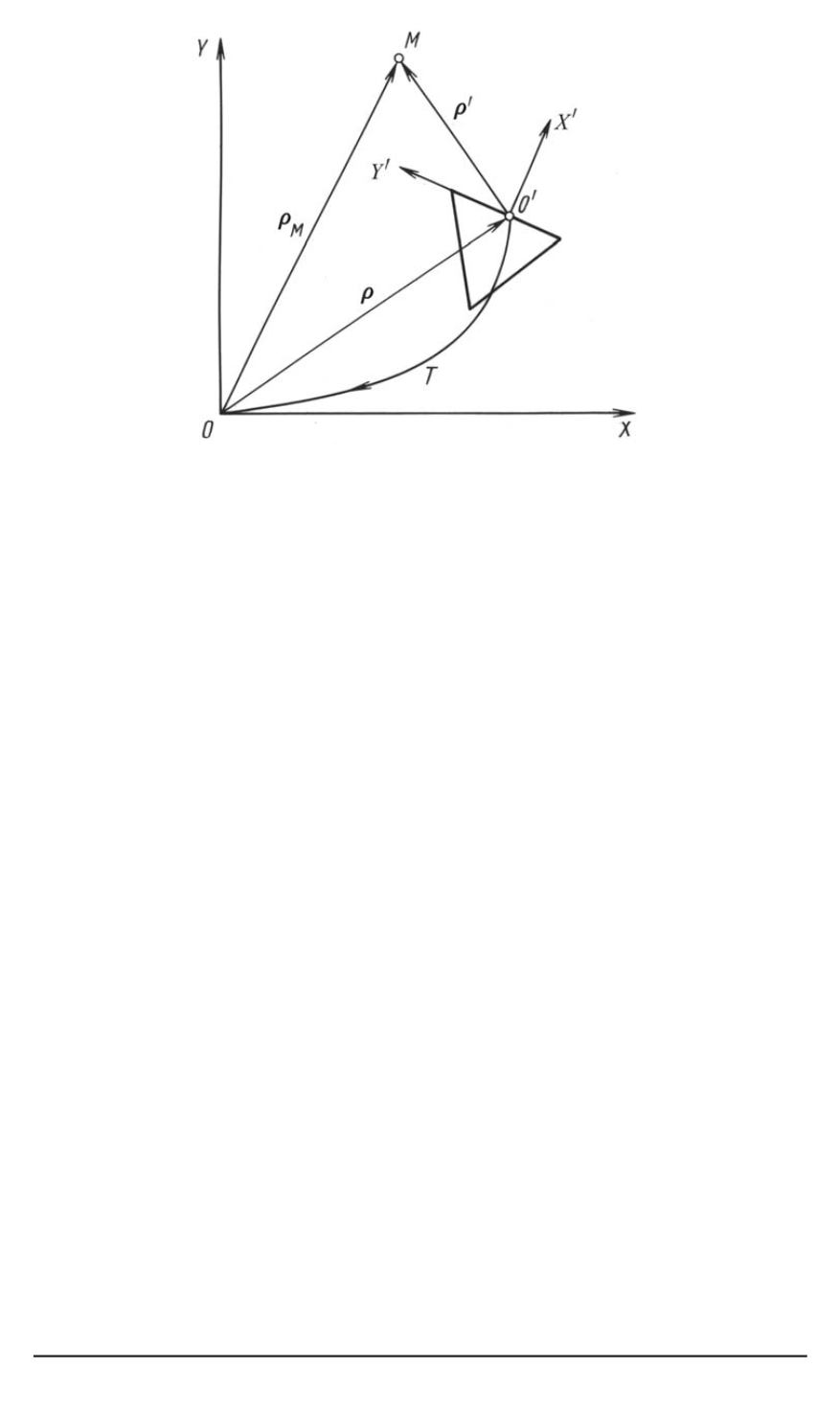
Рис. 5. Получение уравнений объекта в относительной системе координат
Обозначим через
ρ
= (
x y
1)
т
,
ρ
M
= (
x
M
y
M
1)
т
— однородные
векторынеподвижной точки
М
в связанной и абсолютной системах
координат соответственно (рис. 5), тогда имеем
ρ
M
=
T
·
ρ .
Дифференцируя это выражение по времени и учитывая соттношение
(24), получим
˙
ρ
=
−
T
−
1
·
˙
T
·
ρ .
Учитывая, что
T
−
1
=
⎛
⎝
R
т
−
R
т
p
0 1
⎞
⎠
,
а также уравнение объекта в абсолютной системе координат (21), по-
сле простых преобразований получим
˙
x
=
ωy
−
v
;
˙
y
=
−
ωx ,
(25)
где
ω
и
v
— угловая и линейная скорости мобильного робота соответ-
ственно, заданные соотношениями (22), (23). Таким образом, соотно-
шения (25) представляют собой уравнения объекта, фазовыми коор-
динатами которого являются декартовые координаты маяка
x
и
y
в
связанной системе координат. Их эволюция вызывается собственным
движением мобильного робота, обусловленным вращением ведущих
колес с угловыми скоростями
ω
R
и
ω
L
. Если предположить, что
ω
R
и
ω
L
представляют собой программные управления, т.е.
ω
R
=
ω
R
(
t
)
,
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3 43


