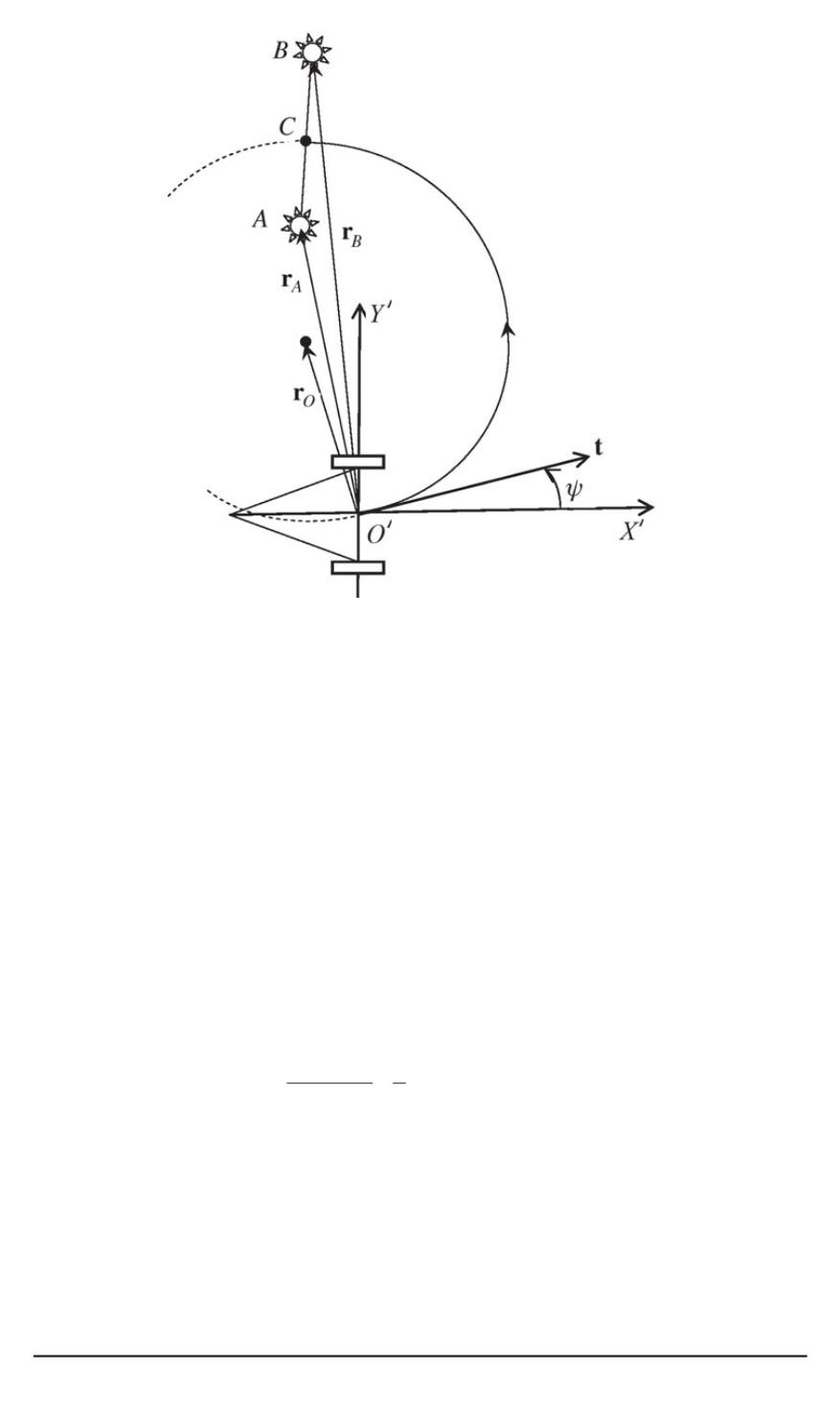
Рис. 9. Программная траектория при прохождении ворот
2)
ω
пересекает линию ворот
А
B
в точке
С
так, что
АС
=
ВС
и
АВ
перпендикулярна
ω
.
Выбор программной траектории, безусловно, не является одно-
значным и в нашей ситуации отражает лишь требование проехать во-
рота, не задев маяка, к чему может привести, например, движение
вдоль прямолинейной траектории, соединяющей текущее положение
робота и центр ворот. Построим эту окружность.
Пусть
r
O
,
r
A
,
r
B
— радиус-векторы, проведенные из точки
О
в
точки
О
(центр окружности),
А
,
В
(створыворот) и заданные в от-
носительной системе координат. После стандартных преобразований
получим следующие соотношения (при
r
2
A
= r
2
B
)
:
r
O
=
λ
r
A
+ (1
−
λ
)r
B
;
(38)
λ
=
1
r
2
A
−
r
2
B
1
4
(r
A
−
r
B
)
2
−
r
2
B
.
Из соотношения (37), определяющего ошибку управления, и из
закона управления (36) следует
tg
ψ
=
−
x
O
/y
O
,
(39)
где
x
O
,
y
O
— компонентывектора
r
O
. Таким образом, в соответствии
с уравнением (39) нам необходимо вычислить отношение координат
центра окружности, задаваемого вектором
r
O
. Вычисляя этот вектор
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3 49


