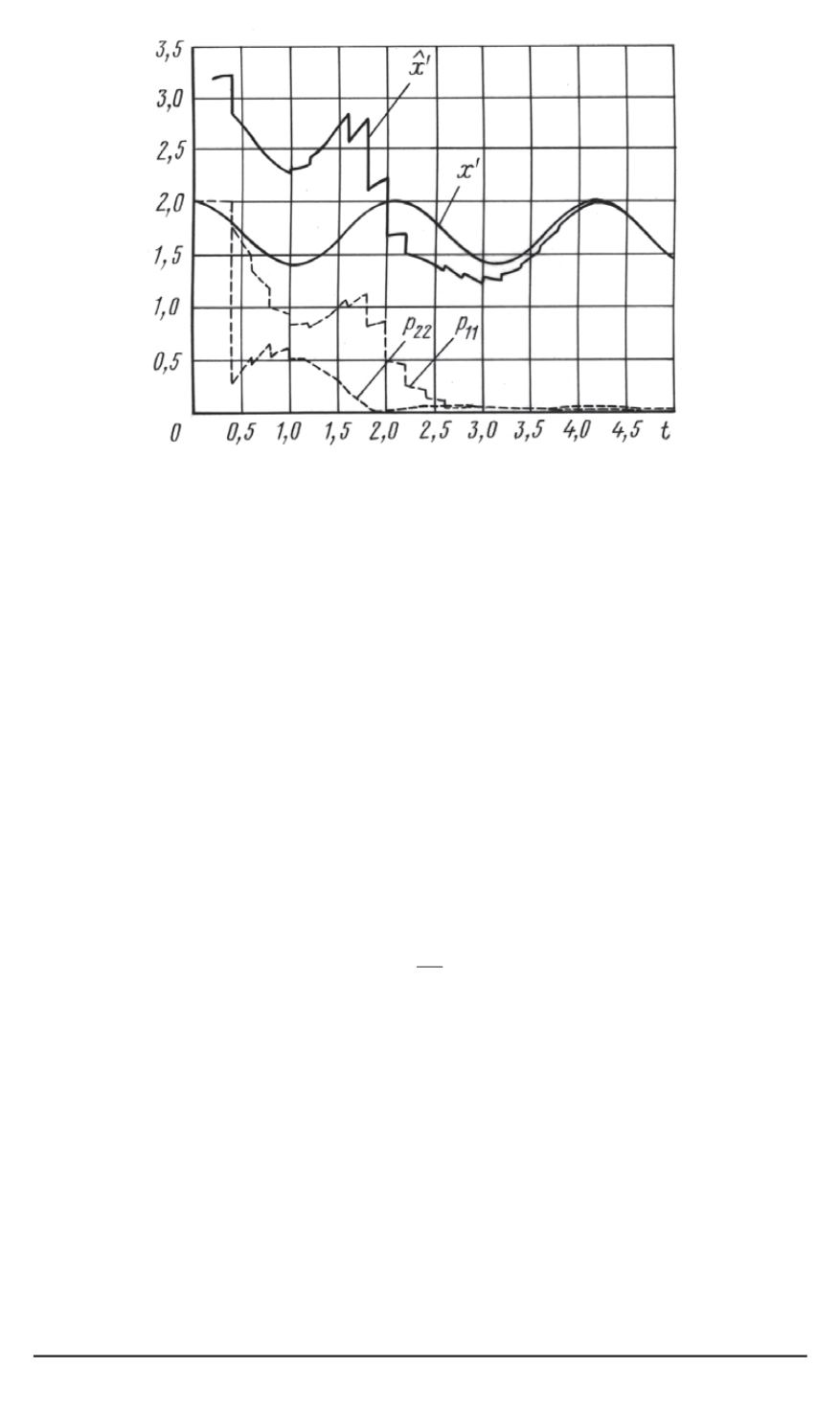
Рис. 6. Результаты моделирования поведения оценок декартовых координат ма-
яка в относительном движении
Управление мобильным роботом.
Приведем основные принци-
пы, положенные в основу управления мобильным роботом, в пред-
положении, что оценку декартовых координат маяков в связанной
системе координат мыполучаем, пользуясь описанными методами ре-
куррентной фильтрации.
Считаем, что закон управления активными колесами имеет вид
ω
R
=
ω
0
+
ω
c
;
ω
L
=
ω
0
−
ω
c
,
где
ω
0
=
const, а
ω
c
— выбираемое управление. В этом случае в соот-
ветствии с соотношениями (22), (23) имеем
v
=
ρω
0
;
ω
=
2
ρ
l
ω
c
.
Это означает, что движение робота происходит с постоянной ли-
нейной скоростью, а управление осуществляется его угловой скоро-
стью.
Будем считать, что задачей управления
ω
c
является следование
предварительно заданной программной траектории. Эта траектория
формируется в связанной с роботом системе координат в виде
f
(
x , y
) = 0
,
(34)
при этом потребуем, чтобыона проходила через начало связанной
системыкоординат, т.е.
f
(0
,
0) = 0
.
(35)
46 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3


