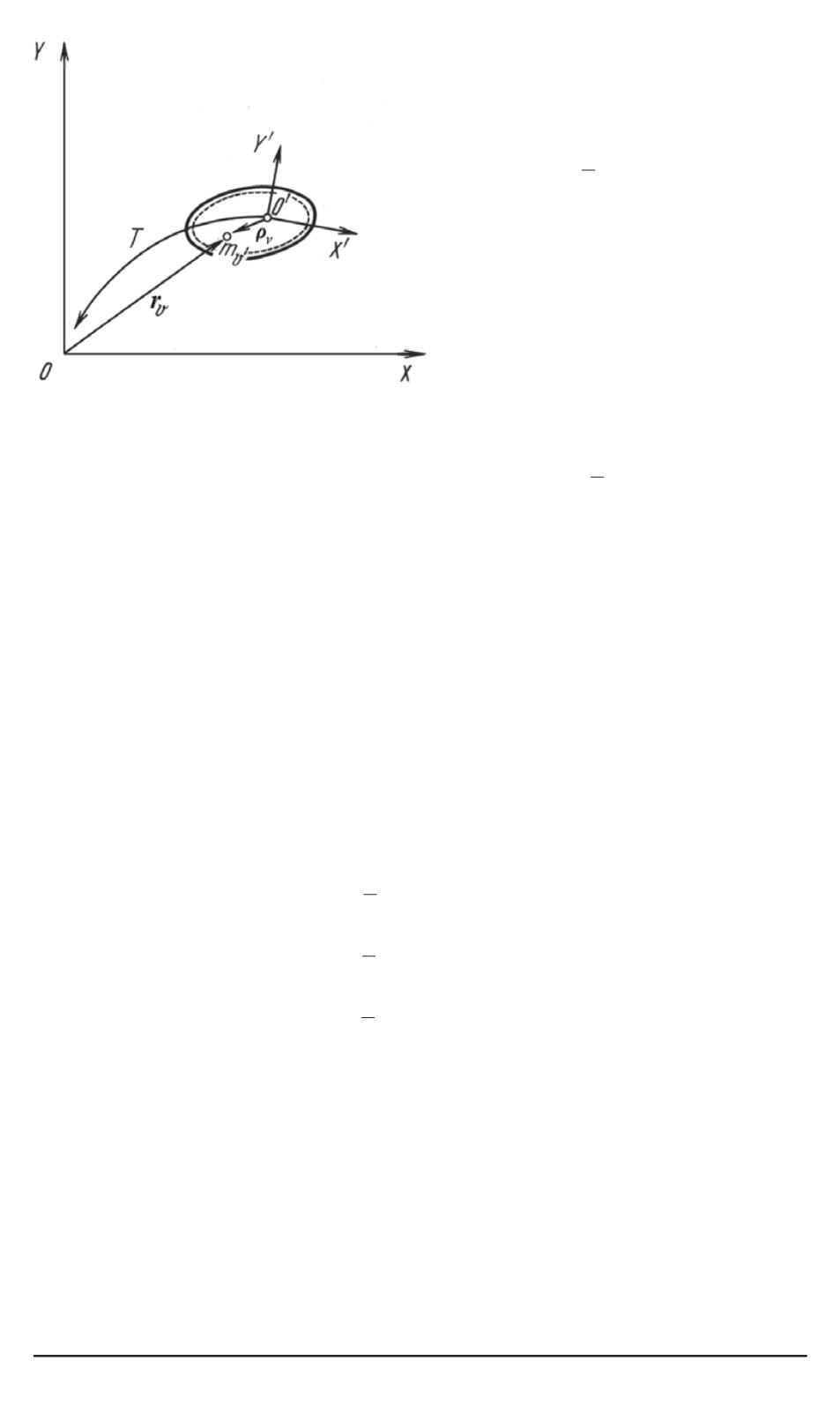
Рис. 2. Системы координат твердого тела
в горизонтальной плоскости
Известно, что энергия уско-
рения
S
твердого тела выража-
ется следующим образом:
S
=
1
2
m
ν
¨r
т
ν
¨r
ν
.
(9)
Продифференцировав дваж-
дыуравнение (8), запишем
¨r
ν
= ¨
Tρ
ν
и подставляя в выражение (9),
после несложных преобразова-
ний получим
S
=
1
2
tr( ¨
TH
¨
T
т
)
,
(10)
где
H
— матрица инерции, имеющая вид
H
=
m
ν
ρ
ν
ρ
т
ν
=
⎛
⎜⎜⎝
I
xx
I
xy
S
x
I
yx
I
yy
S
y
S
x
S
y
m
⎞
⎟⎟⎠
,
где
I
uv
=
m
ν
u
ν
v
ν
— моменты2-го порядка (
u, v
∈ {
x, y
}
)
;
S
u
=
m
ν
u
ν
— моменты1-го порядка (
u
∈ {
x, y
}
)
.
Связь между моментами
I
uv
и моментами 2-го порядка вокруг осей
i
u
имеет вид:
I
xx
=
1
2
(
−
i
x
+
i
y
+
i
z
);
I
yy
=
1
2
(
i
x
−
i
y
+
i
z
);
I
zz
=
1
2
(
i
x
+
i
y
−
i
z
)
.
Сделаем теперь следующие предположения относительно кон-
структивных особенностей робота:
1. Моментыинерции колес значительно меньше соответствующих
моментов платформы;
2. Центр массыплатформылежит на оси
X
в точке
О
СМ
c коор-
динатами
(
−
b,
0)
(см. рис. 1);
3. Матрица инерции платформыв системе координат
O
CM
X Y
,
36 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3


