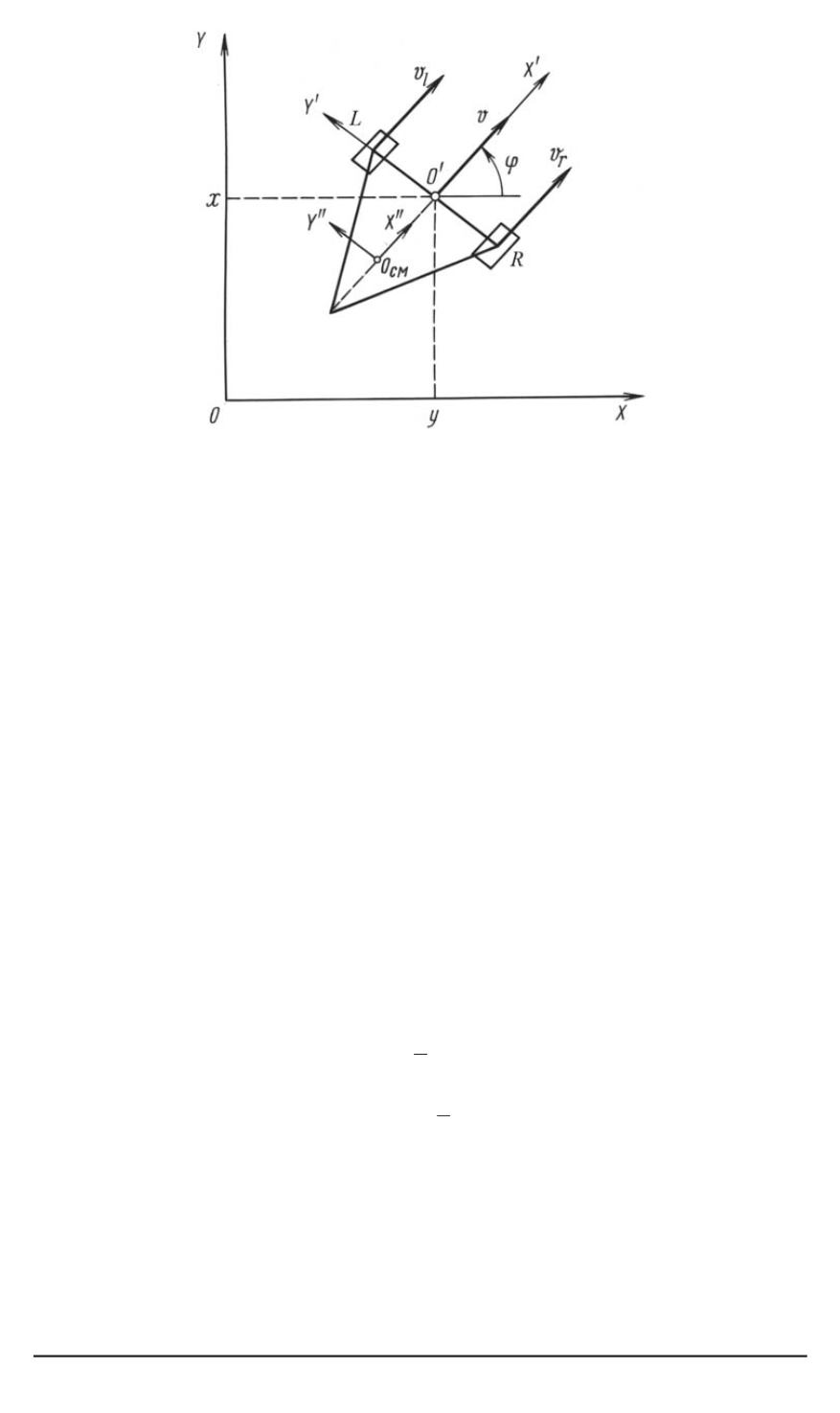
Рис. 1. Схема движения мобильного робота в горизонтальной плоскости
В выражении (1)
R
и
p
представляют собой соответственно ма-
трицу ориентации и вектор положения начала системыкоординат
O
в абсолютной системе координат.
Если обозначить векторылинейных скоростей точек
O
,
L
и
R
как
v
,
v
l
,
v
r
соответственно, а через
ω
— угловую скорость, то можно
записать следующие соотношения:
v
1
= v +
ω
Ω
r
l
;
v
r
= v +
ω
Ω
r
r
,
(2)
где матрица
Ω
имеет вид
Ω =
0
−
1
1 0
.
Нетрудно заметить, что
Ω
является ортогональной матрицей, обес-
печивающей поворот произвольного вектора на
π/
2
.
Запишем теперь следующие очевидные соотношения:
r
l
=
1
2
y ;
r
r
=
−
1
2
y ;
v
l
=
v
l
x ;
v
r
=
v
r
x
,
(3)
где
x
и
y
— единичные ортысистемыкоординат
O X Y
, а
v
l
,
v
r
— проекции соответствующих векторов на ось
Х
. Вектор линейной
скорости точки
О
в силу соотношений (3) совпадает с осью
Х
. Вос-
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3 33


