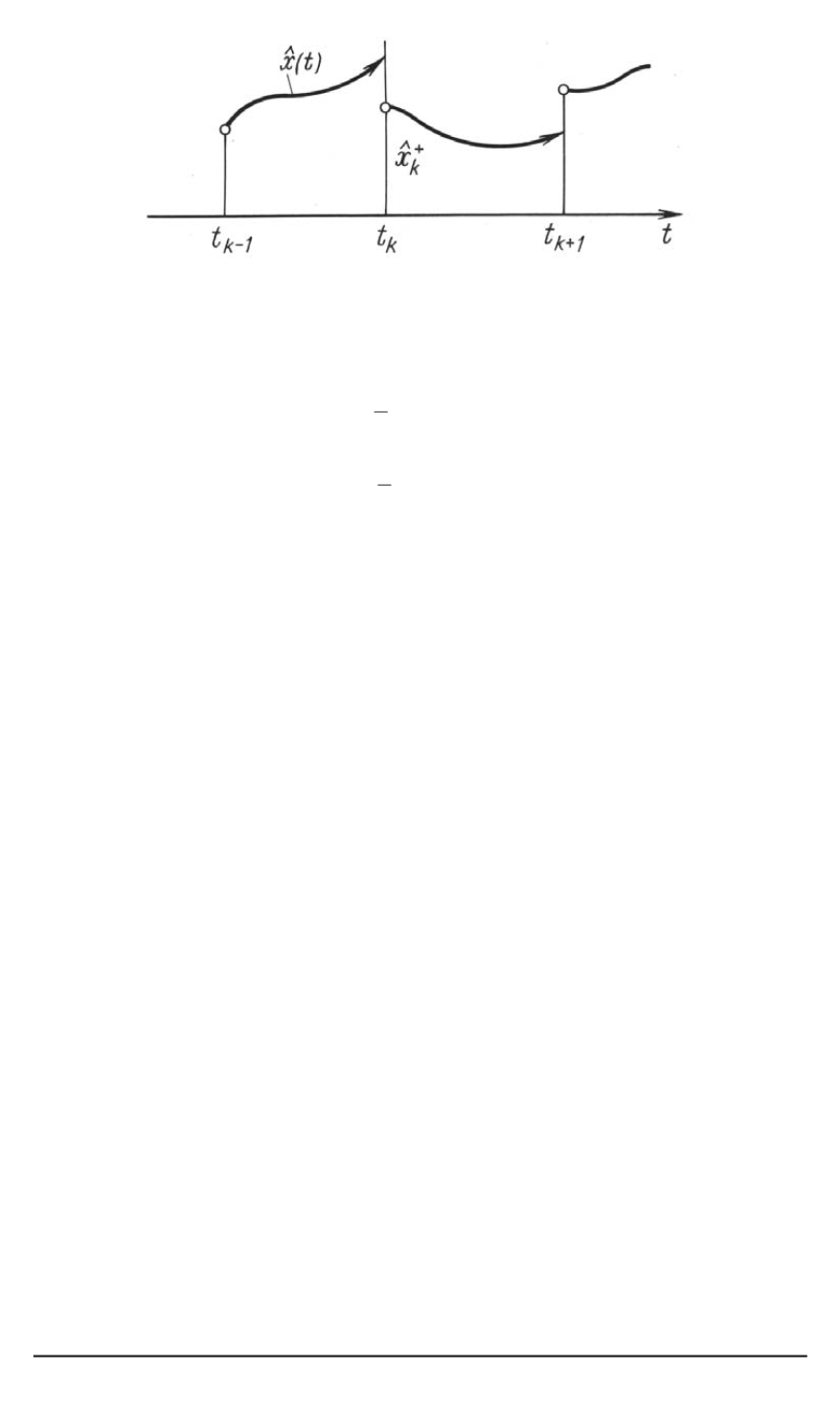
Рис. 4. Поведение оценок в случае непрерывного объекта с дискретными изме-
рениями
где
v
=
ρ
2
(
ω
R
+
ω
L
);
(22)
ω
=
ρ
l
(
ω
R
−
ω
L
);
(23)
x
,
y
— декартовыкоординатыробота в абсолютной системе;
v
,
ω
—
линейная и угловая скорости робота соответственно;
ω
R
,
ω
L
— угловые
скорости правого и левого колеса соответственно;
ρ
— радиус колеса;
l
— расстояние между ведущими колесами.
Пусть
x
м
,
y
м
— декартовыкоординатымаяка. Поскольку маяк не-
подвижен, то имеют место соотношения
˙
x
м
= 0;
˙
y
м
= 0
.
(24)
Системы(21) и (24), вообще говоря, представляют собой уравнения
объекта. Однако воспользоваться ими весьма затруднительно по двум
причинам. Во-первых, модель является нелинейной. Фильтр, оценива-
ющий фазовый вектор нелинейной системы, использует разложение в
ряд в окрестности текущей оценки и является весьма чувствительным
по отношению к начальным условиям. Во-вторых, размерность си-
стемы дифференциальных уравнений, описывающих фильтр, высока
и равна 20 (5 — для объекта, 15 — для матрицыковариаций ошиб-
ки оценки). Учитывая, что в ряде заданий, выполняемых мобильным
роботом, необходимо оценивать координатынескольких маяков, ста-
новится ясно, что этот подход является бесперспективным.
Воспользуемся тем обстоятельством, что для управления движе-
нием мобильного робота, вообще говоря, не обязательно знать аб-
солютные координатымаяков, но достаточно знать их координатыв
связанной системе
O X Y
.
Пусть однородная матрица перехода от связанной системыкоор-
динат
O X Y
к абсолютной системе
OXY
имеет вид матрицы(1).
42 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3


