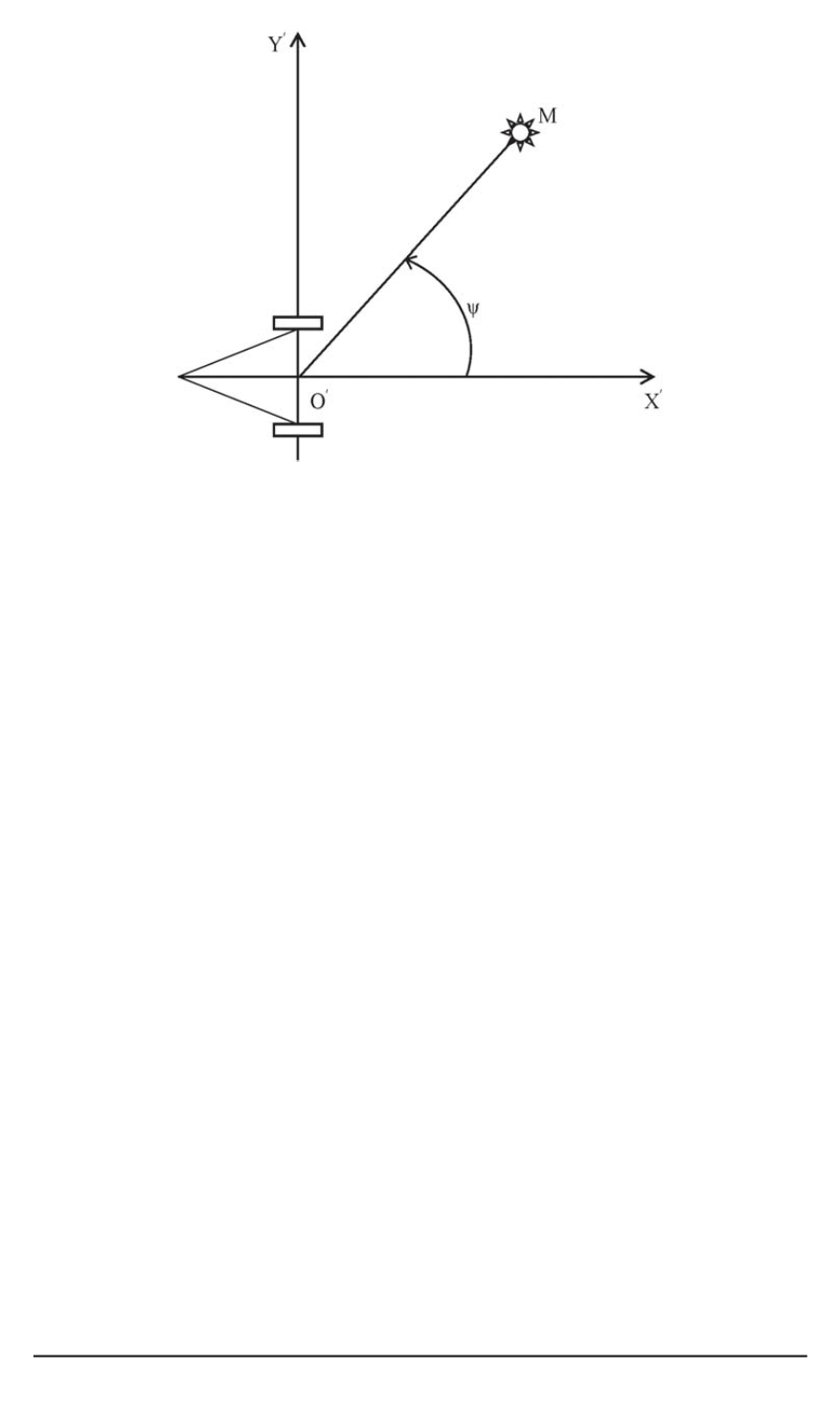
Рис. 8. Программная траектория при движении на маяк
Рассмотрим два примера задач из числа тех, которые входят в ре-
гламент соревнований мобильных роботов [1], о которых шла речь
ранее.
1.
Движение на маяк.
Задание состоит в том, чтобыкоснуться ак-
тивного маяка, используя информацию о его относительном угловом
положении, поступающую с бортовой сенсорной системы. Будем счи-
тать для простоты, что
TV
-камера установлена в точке
О
и поставляет
в систему управления угол
α
на маяк. Будем считать далее, что про-
граммной траекторией в каждый момент времени является отрезок
прямой
О
M
, соединяющей начало системыкоординат робота и маяк
(рис. 8). Поскольку касательный вектор к прямой совпадает с ней са-
мой, то ошибка управления
ψ
=
α
. Такой же результат мыполучим и
при использовании соотношения (36).
Таким образом, соотношения (36) и (37) приводят к очевидному ре-
зультату, состоящему в том, что ошибкой управления является откло-
нение оси робота
Х
от направления на маяк, получаемого от системы
зрения.
2.
Въезд в ворота
. Задача состоит в том, чтобы робот въехал в
створ ворот, задаваемых двумя активными маяками
А
и
В
. Выберем в
качестве программной траектории дугу окружности
ω
:
f
(r) = (r
−
r
О
)
2
−
R
2
= 0
,
где
r = (
x , y
)
т
,
(r
−
r
O
)
2
= (r
−
r
O
)
т
(r
−
r
O
)
,
R
— радиус окружно-
сти.
Окружность
ω
обладает следующими свойствами (рис. 9):
1)
ω
проходит через
О
(что соответствует соотношению (35));
48 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3


