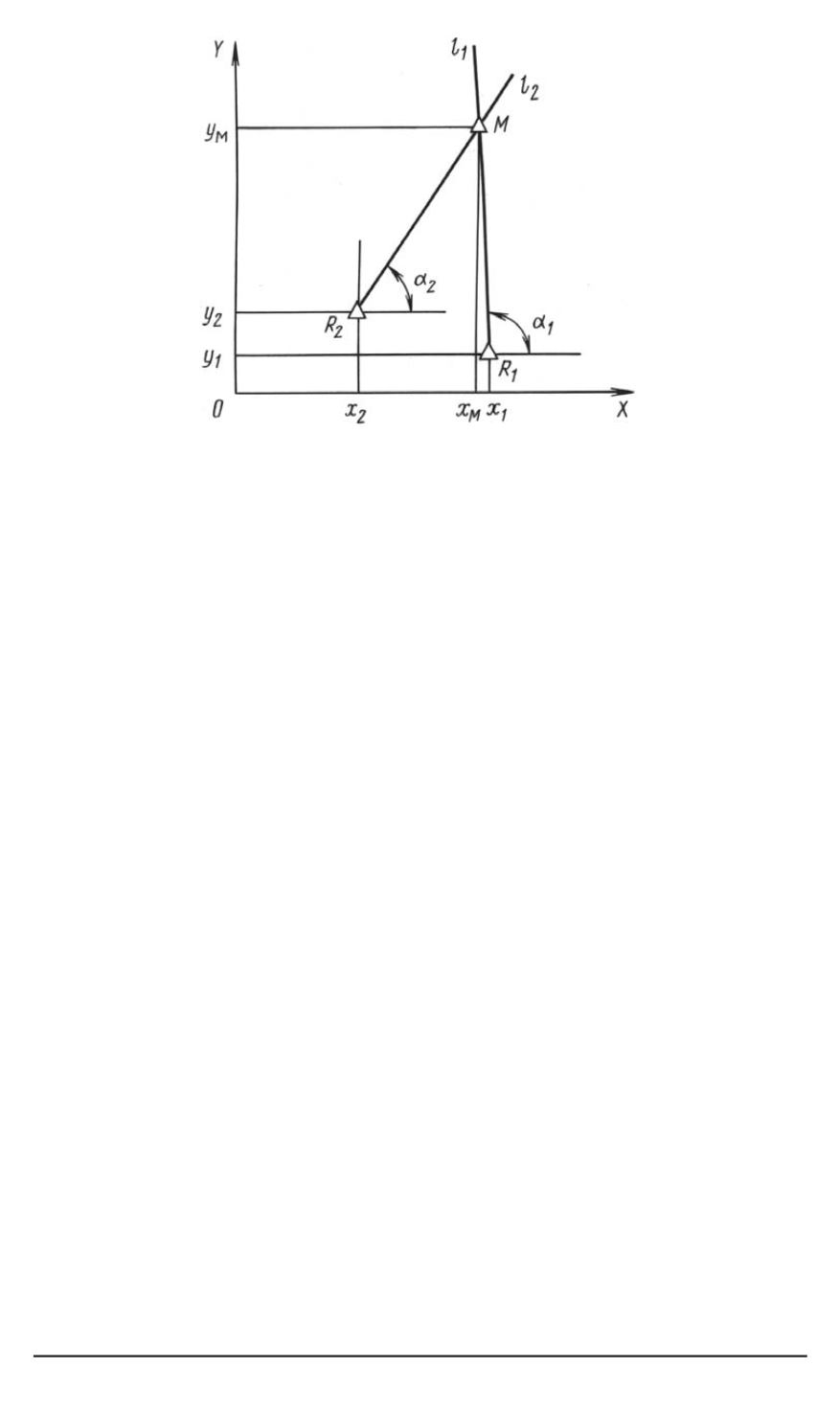
Рис. 3. К методу оценки декартовых координат
определении декартовых координат объектов внешней среды на осно-
ве некоторых измерений, при этом используются датчики различного
типа. Рассмотрим следующую задачу: по измерениям, производимым
телевизионной системой, требуется определить координатымаяков,
попавших в поле зрения
TV
-камеры. Эта задача является весьма важ-
ной для планирования движения робота. В основе ее решения лежит
простой метод триангуляции, состоящий в следующем. Если известны
координатыдвух точек
R
1
и
R
2
(рис. 3), в которые помещены изме-
рители, а также углы
α
1
и
α
2
на некоторый объект
М
, то нахождение
координат последнего является простой тригонометрической задачей.
Она сводится к нахождению координат точки пересечения прямых
l
1
и
l
2
, проведенных через точки
R
1
и
R
2
под углами
α
1
и
α
2
.
Специфика применения этого подхода для решения задачи навига-
ции состоит в следующем:
1.
TV
-камера, установленная на роботе, — один измеритель.
2. Измеритель перемещается в плоскости, измеряя углы. Резуль-
татыявляются дискретными, поскольку роботу требуется конечное
время на обработку видеоинформации, поступающей с СТЗ.
Поэтому использование рекуррентных методов фильтрации слу-
чайных процессов представляется весьма целесообразным.
Фильтр Калмана для линейного непрерывного объекта с дискрет-
ными измерениями.
Для удобства приведем известные соотношения
для рекуррентного оценивания фазового вектора непрерывной линей-
ной системыпо дискретным измерениям.
Пусть система описывается следующим образом:
˙x =
A
(
t
)x + f (
t
);
z
k
=
H
k
x
k
+
ξ
k
.
(17)
40 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3


