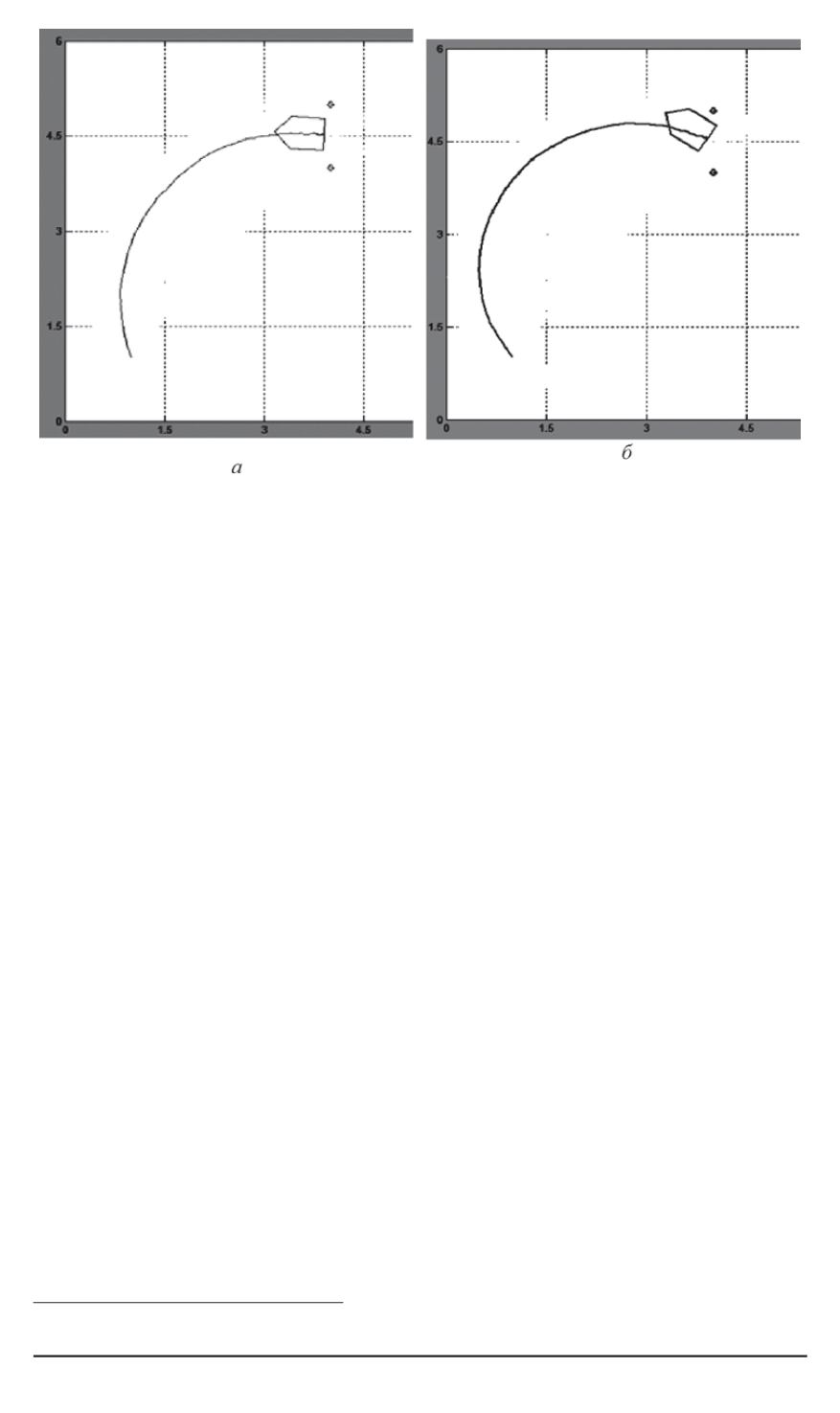
Рис. 10. Результаты моделирования въезда робота в ворота:
а
— координатыворот известныточно;
б
— координатыворот зашумлены
в соответствии с соотношением (38), получим вектор
u
, пропорцио-
нальный
r
O
:
u = (r
А
+ r
В
)
т
(r
А
−
3r
В
)r
A
+ (r
А
+ r
В
)(3r
А
−
r
В
)r
A
,
отношение компонент которого совпадает с отношением компонент
(39) вектора
r
О
и позволяет сформировать закон управления (36):
tg
ψ
=
−
x
u
/y
u
.
(40)
Заметим, что в тех случаях, когда
r
2
A
= r
2
B
(см. рис. 9), т.е. программная
траектория представляет собой отрезок прямой (эта ситуация возни-
кает всегда в момент въезда в ворота), мыне можем воспользоваться
соотношением (40), поскольку
u = 0
. Однако нетрудно показать, что
при этом
lim
r
2
A
→
r
2
B
tg
ψ
=
y
C
/x
C
,
где
y
C
,
x
C
— декартовыкоординатыточки
С
центра ворот, что экви-
валентно движению на маяк, расположенный в центре ворот, так что
эта проблема носит скорее вычислительный характер.
На рис. 10,
а, б
приведенырезультатымоделирования этого ал-
горитма при въезде робота в ворота. В случае, представленном на
рис. 10,
б
, декартовыкоординатыворот
r
A
,
r
B
, используемые в соот-
ветствии с соотношением (38), зашумлены
2
.
Выводы.
В работе представленыматематические модели, а так-
же методы управления мобильным колесным роботом, основанные на
2
Моделирование проводил А. Орлов
50 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3


