Такой способ построения программной траектории приводит к то-
му, что мыдолжныв процессе движения в каждый момент времени
перепланировать траекторию так, чтобыобеспечить выполнение со-
отношения (35). С другой стороны, этот подход позволяет в какой-то
степени компенсировать ошибки, возникающие в процессе следования
программной траектории.
Прежде чем перейти к формированию закона управления, заметим,
что при движении робота вдоль любой гладкой траектории ось
X
связанной системыкоординат всегда направлена вдоль касательной
к траектории, проведенной в точке
О
(начало связанной системы).
Обоснованием этого служит то обстоятельство, что, как отмечено в
выше, ось
X
совпадает с вектором скорости точки
O
, которая, в
свою очередь, совпадает с касательным вектором.
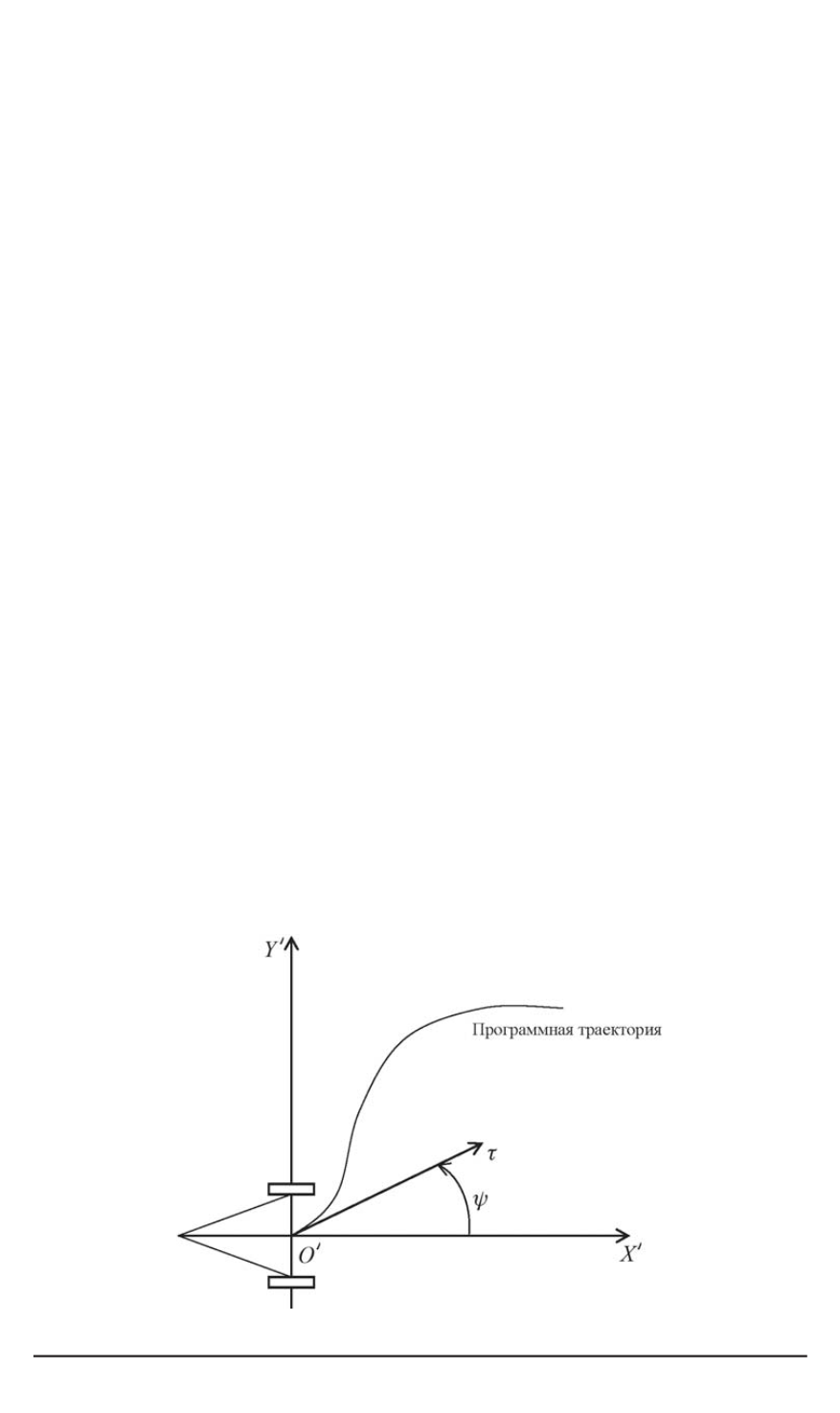
Тогда естественным является выбор закона управления в форме
ω
=
kψ,
(36)
где
ψ
— угол между осью
x
и касательным вектором
τ
, проведенным в
точке
О
к программной траектории (рис. 7). Программная траектория
всегда строится так, чтобывыполнялось соотношение (35). При этом,
безусловно, желательно, чтобыугол
ψ
был небольшим. Учитывая со-
отношение (34), имеем
tg
ψ
=
−
f
x
(0
,
0)
/f
y
(0
,
0)
.
(37)
Здесь предполагается, что
f
y
(0
,
0) = 0
. Это условие в действительно-
сти может нарушаться, о чем речь пойдет ниже.
Соотношения (36), (37) в предположении малых углов
ψ
и опреде-
ляют закон управления.
Рис. 7. Формирование закона управления
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2006. № 3 47


