следующие лингвистические переменные: агрессивность поведения
(стиль вождения); способности водителя; обзор во время движения.
Такой параметр, как возраст водителя, можно учесть выражением (7)
без применения нечеткой логики.
В среде Matlab на основе результатов исследований [7, 9, 10] син-
тезирована схема нечеткой оценки значений степени риска возник-
новения аварийной ситуации
T
c
и
T
вн
. Входными данными для
T
c
являются уровень агрессии, наблюдательность (обзор), способности
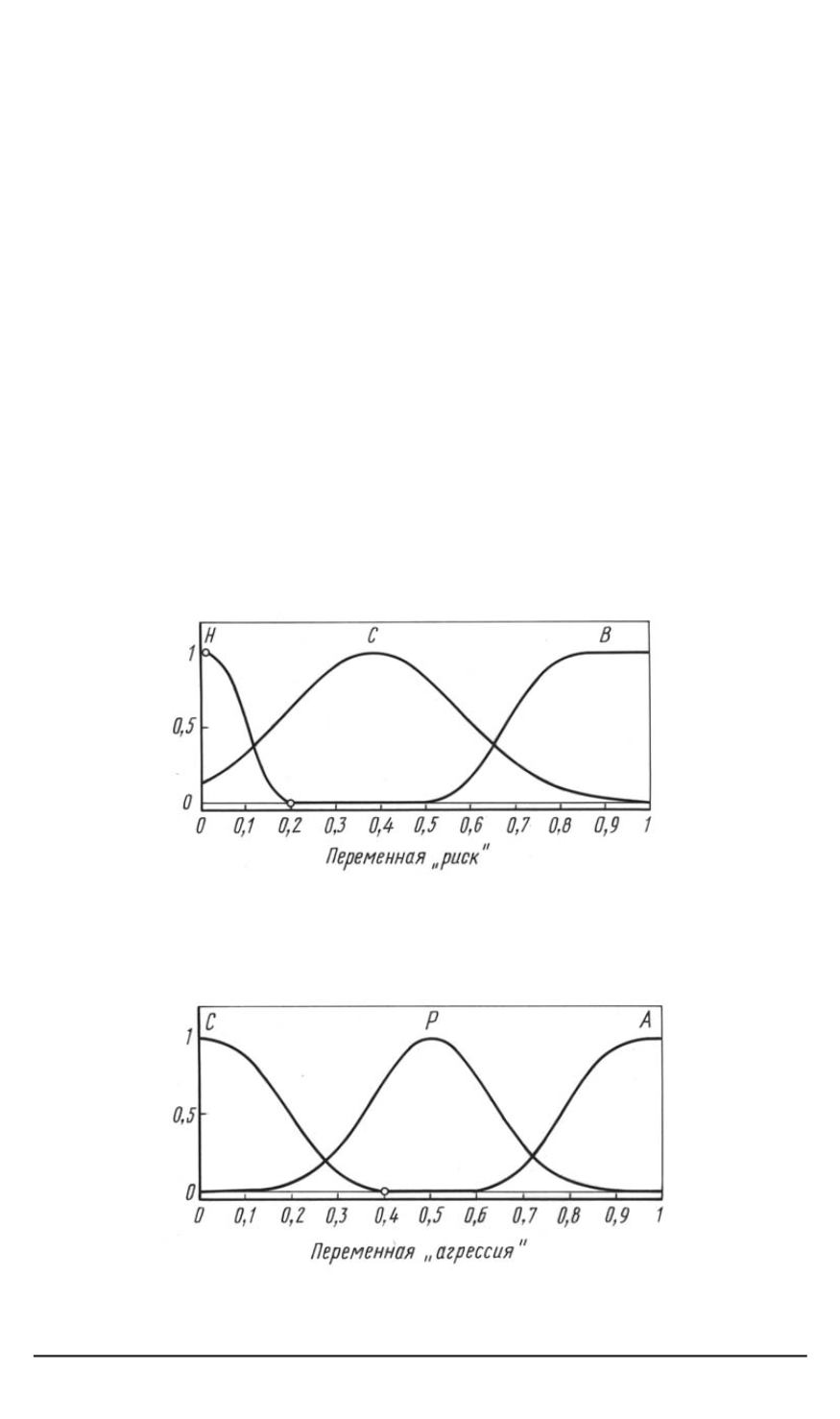
к вождению. Функции принадлежности, реализующие множества зна-
чений переменных “риск”, “агрессия”, “способность к вождению” и
“наблюдательность (обзор)” изображены на рис. 10–13.
Результаты оценки приведены на рис. 14. Для наглядности изо-
бражения оценки
T
c
в трехмерном пространстве принимаем одну из
переменных константой (для примера константа равна 0,5). Следует
отметить, что для оценки степени риска
T
вн
с входными нечеткими
переменными “полотно”, “трафик”, “покрытие” используется анало-
гичная схема.
Рис. 10. Функции принадлежности нечеткой переменной “риск”
(значения — низкий (
Н
), средний (
С
), высокий (
В
))
Рис. 11. Функции принадлежности нечеткой переменной “агрессия”
(значения — водитель спокойный (
С
), раздраженный (
Р
), агрессивный (
А
))
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 2 17


