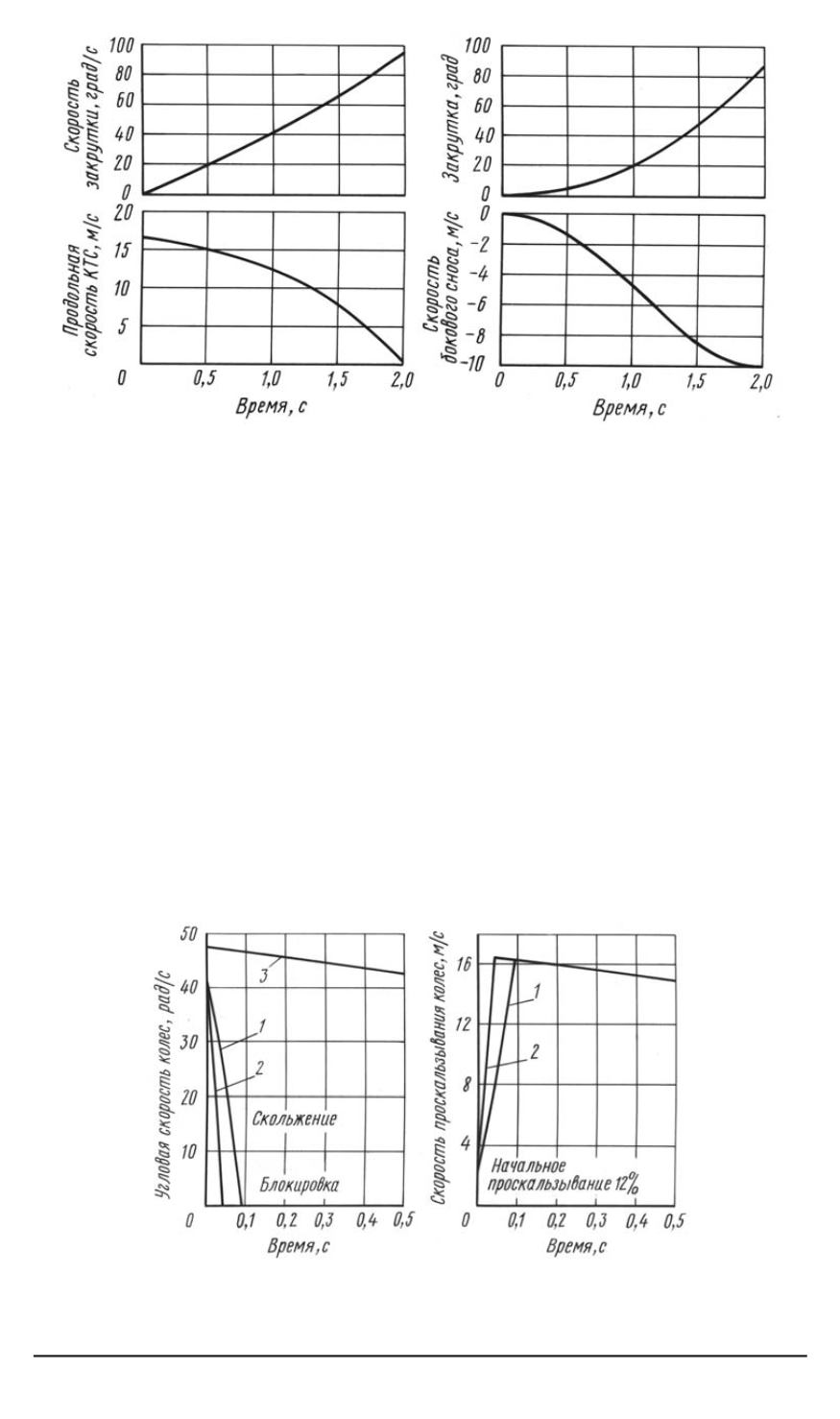
Рис. 3. Развитие аварийной ситуации при торможении с
μ
= 0
,
9
(попадание на
лед) с тормозным моментом
1
,
5
M
br
Анализ результатов моделирования показывает, что за 2 с угол за-
крутки КТС возрос до 90
◦
и продолжает возрастать с увеличиваю-
щейся скоростью, боковой снос составляет около 10 м/с (в условиях
моделирования принято, что микст одинаков для передних и задних
колес КТС, что позволяет рассмотреть, например, лишь колеса 11 и
12, рис. 3).
Движение начиная с 0,1 с происходит в режиме “блокировка”
(рис. 4), в котором снижается потенциальная возможность активно
бороться при помощи тормозов с закручиванием (снижение АБС-
управляемости КТС [15]). Предотвратить такой режим водитель не
успевает, даже, если бы он и имел возможность на него влиять (сред-
нее время реакции водителя около 0,5 с).
Рис. 4. Режимы торможения при
μ
= 0
,
9
(попадание на лед):
кривые
1
и
2
— торможение колес 11 и 12 соответственно;
3
— кривая временной
зависимости угловой скорости качения
8 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 2


