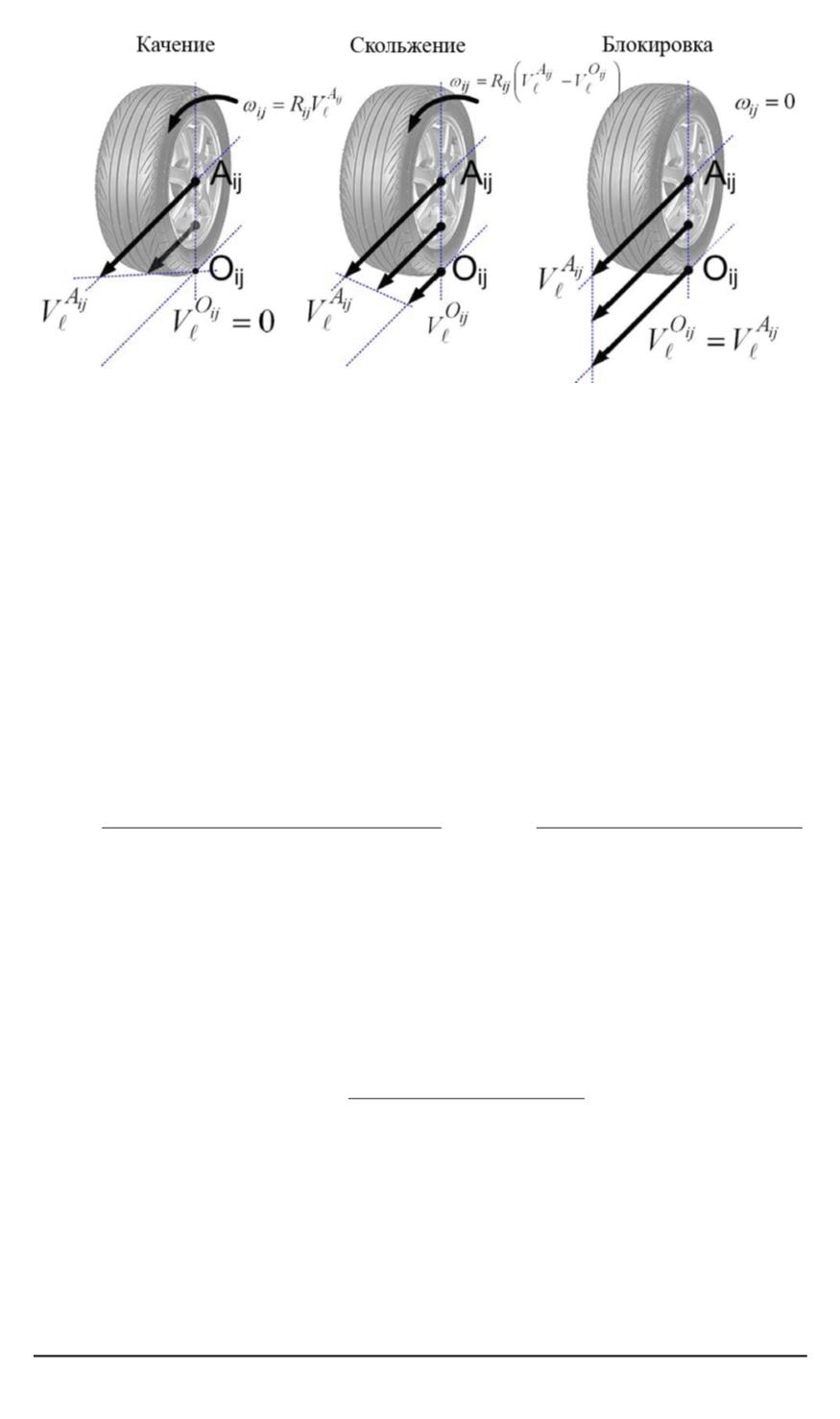
Рис. 2. Режимы движения колеса
центра масс КТС на оси
x, y
;
J
y
ij
— полярный момент инерции
ij
-го
колеса;
Ω
y
ij
Δ
=
ω
ij
— угловая скорость
ij
-го колеса.
На рис. 2 показаны различные варианты режимов движения коле-
са: качение (относительное проскальзывание равно нулю), блокировка
(угловая скорость вращения колеса равна нулю, относительное про-
скальзывание вдоль оси равно единице), скольжение (относительное
проскальзывание принимает промежуточное значение).
Относительное проскальзывание
ij
-го колеса вдоль осей и
q
опре-
деляется по выражениям из работы [1]:
s
l
ij
=
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
−
Ω
y
ij
R
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
;
s
q
ij
=
−
V
A
ij
x
sin
ψ
+
V
A
ij
y
cos
ψ
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
.
В зависимости от того, в каком режиме движения находится коле-
со, изменяется его уравнение движения. При качении колеса порядок
уравнений, описывающих его движение, снижается на единицу в ви-
ду того, что угловая скорость перестает быть независимой перемен-
ной [20].
Условие качения колеса без проскальзывания [20] имеет вид
P
q
ij
(
ϕ
ij
)
2
(
N
ij
)
2
−
P
ij
2
,
(1)
где
N
ij
— нормальная к поверхности реакция
ij
-го колеса;
ϕ
ij
— коэф-
фициент сцепления
ij
-го колеса с дорогой, зависящий от типа покры-
тия.
Экспериментальные данные для коэффициентов сцепления
ϕ
ij
в
зависимости от различных покрытий приведены в табл. 1 [20]
6 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 2


