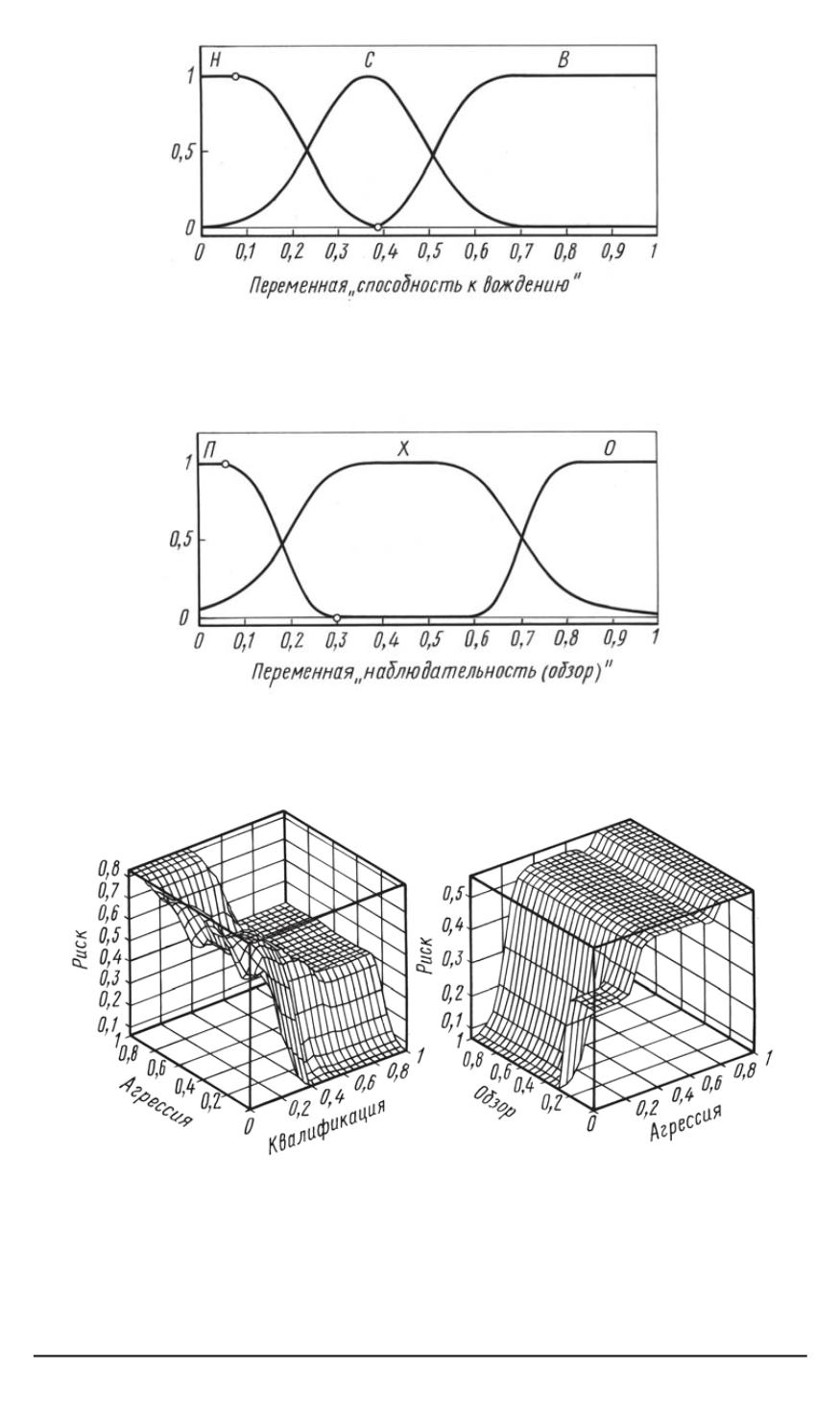
Рис. 12. Функции принадлежности нечеткой переменной “способность к вожде-
нию”
(значения — низкая (
Н
), средняя (
С
), высокая (
В
))
Рис. 13. Функции принадлежности нечеткой переменной “наблюдательность
(обзор)”
(значения — плохая (
П
), хорошая (
Х
), отличная (
О
))
Рис. 14. Примеры оценок работы нечеткого алгоритма определения оценки рис-
ка, обусловленного внутренними предпосылками
18 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2008. № 2


