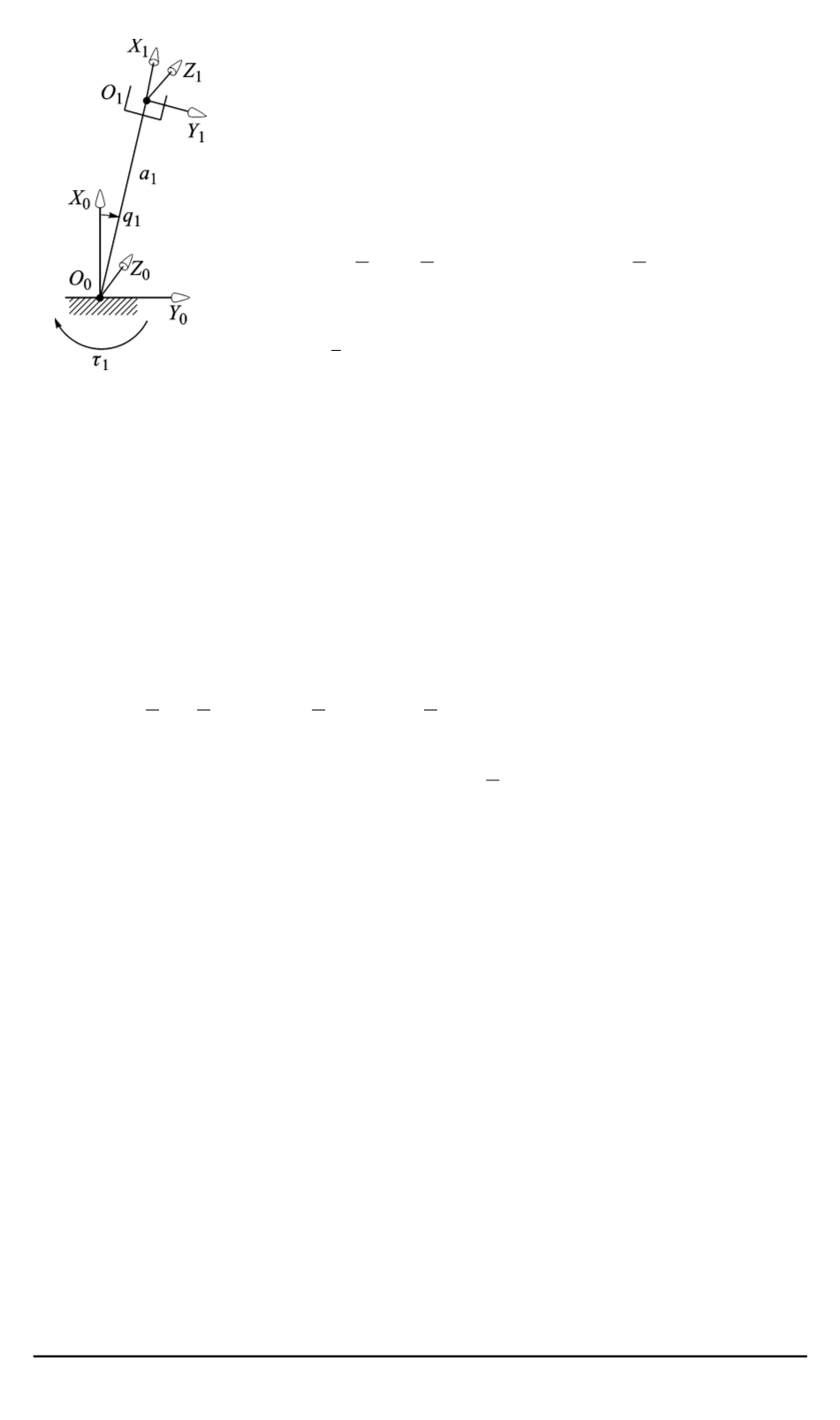
Рис. 2. Кинематиче-
ская схема одно-
звенного манипуля-
тора
кинетической и потенциальной энергии, а также
коэффициентов влияния элементарных инерцион-
ных параметров в реальных задачах необходимо
численно с помощью какого-либо пакета компью-
терной алгебры, однако в данном примере для
большей наглядности сделаем это аналитически:
w
L
=
1
2
˙
q
2
1
00
1
2
˙
q
2
1
00
a
1
˙
q
2
1
−
gc
1
gs
1
0
1
2
a
2
1
˙
q
2
1
−
a
1
gc
1
.
Пусть базис системы векторов
w
L
имеет вид
˜w
L
=
1
2
˙
q
2
1
−
gc
1
gs
1
. Тогда вектор базовых инер-
ционных параметров манипулятора равен
˜p =
I
1
xx
+
I
1
yy
+ 2
a
1
S
1
x
+
a
2
1
m
1
S
1
x
+
a
1
m
1
S
1
y
т
.
Очевидно, что эта пара
( ˜w
L
,
˜p)
является реше-
нием, поскольку
˜w
L
— система линейно независимых векторов, и
˜w
L
˜p =
K
−
П
.
Теперь получим решение с помощью предлагаемого метода и срав-
ним его с приведенным ранее. Сформируем базисное множество вспо-
могательного пространства
F
2
в соответствии с теоремой о базисном
множестве:
β
F
2
=
1
2
˙
q
2
1
,
1
2
˙
q
2
1
cos
q
1
,
1
2
˙
q
2
1
sin
q
1
,
1
2
˙
q
2
1
cos 2
q
1
,
1
2
˙
q
2
1
sin 2
q
1
,
1
,
cos
q
1
,
sin
q
1
.
Найдем координаты векторов
w
i
L
и составим из них матрицу
Z =
1 0 0 1 0 0 2
a
1
0 0
a
2
1
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0 0 0 0 0
0 0 0 0 0 0
−
g
0 0
−
a
1
g
0 0 0 0 0 0 0
g
0 0
.
Матрицу
Z
необходимо привести к ступенчатому виду. Однако в на-
шем случае она фактически уже приведена к нему: очевидно, что,
переставляя 2-ю и 7-ю, а также 3-ю и 8-ю строки, мы получаем ис-
комую матрицу. Тогда базис системы столбцов матрицы
Z
образуют
38 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1


