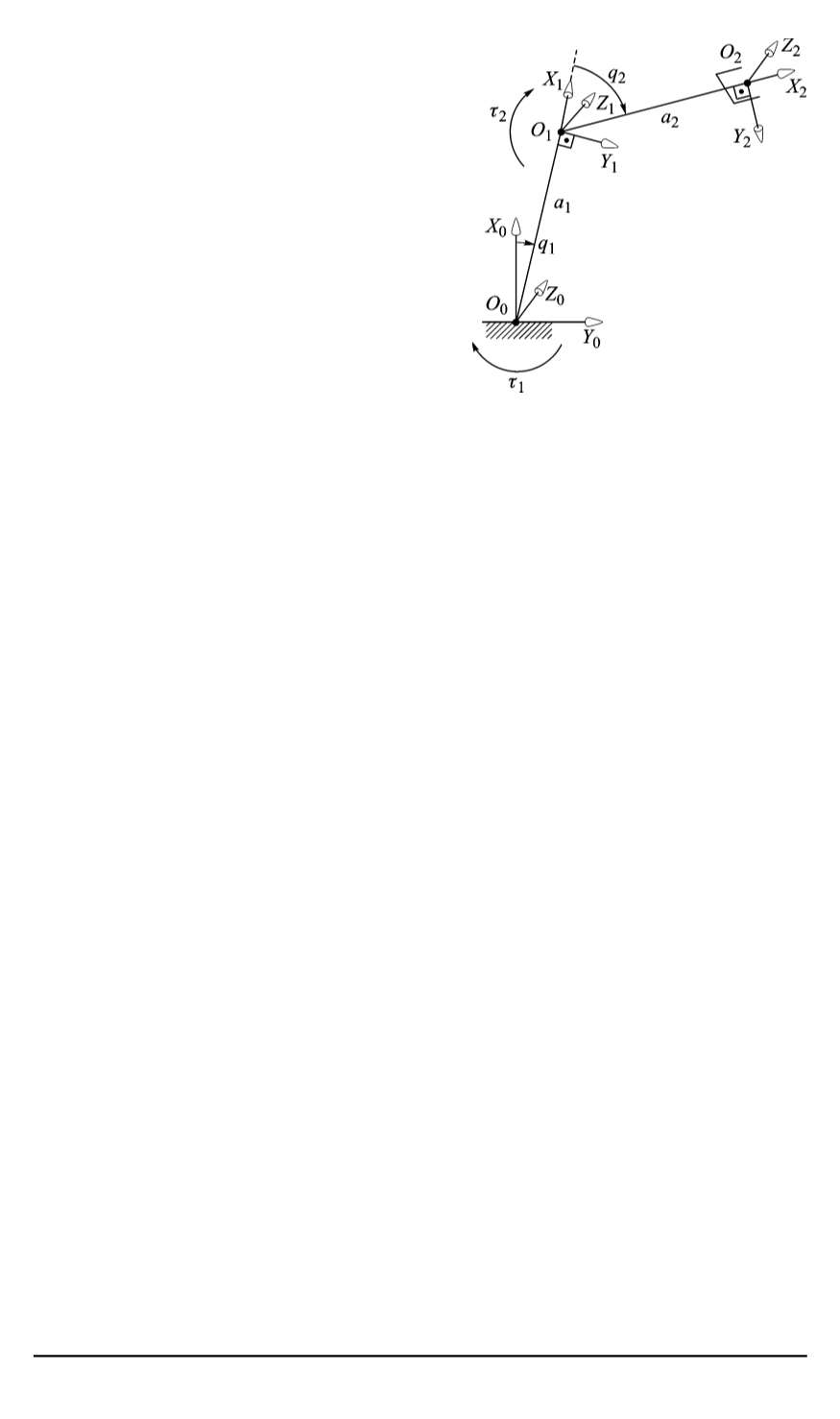
Рис. 1.
Кинематическая схема
плоского двухзвенного манипуля-
тора
звеньев
m
1
, m
2
, статические моменты
S
1
x
, S
1
y
, S
2
x
, S
2
y
и осевые моменты инер-
ции
i
1
zz
, i
2
zz
. Кроме того, считается воз-
можным в течение необходимого про-
межутка времени измерить углы в со-
членениях
q
1
, q
2
и моменты приводов
τ
1
, τ
2
, а также вычислить или изме-
рить производные
˙
q
1
,
˙
q
2
,
¨
q
1
,
¨
q
2
.
Однако таким образом невозмож-
но однозначно оценить инерционные
параметры манипулятора — решений
оказывается бесконечно много. Это
связано с тем, что одни параметры во-
обще не входят в уравнение движе-
ния, а другие входят, но не отдельно,
а некоторыми линейными комбинаци-
ями и только их и возможно определить. Такие линейные комбинации
инерционных параметров называют
базовыми инерционными параме-
трами
. Задача их поиска очень важна, поскольку позволяет разрешить
неоднозначность при параметрической идентификации динамической
модели манипулятора. Кроме того, множество базовых инерционных
параметров является минимальным набором параметров, однозначно
определяющим динамику рассматриваемого механизма. Поэтому ис-
пользование уравнения движения, полученного в терминах базовых
инерционных параметров, позволяет минимизировать число вычисли-
тельных операций при решении обратной задачи динамики (ОЗД). Эта
особенность оказывается крайне полезной, поскольку при реализации
алгоритмов динамического управления решать ОЗД требуется в режи-
ме реального времени.
В настоящей работе предложен новый метод поиска базовых инер-
ционных параметров для манипуляторов с произвольной кинемати-
ческой схемой без ветвлений. Приведены основные понятия и опре-
деления, математическое обоснование предлагаемого метода, а также
дана краткая характеристика существующих способов решения этой
задачи. Рассмотрено использование метода на примере простейших
механизмов.
Основные понятия.
Будем рассматривать
N
-звенный манипуля-
тор как систему из
N
твердых тел, связанных кинематическими па-
рами 5-го класса (поступательными или вращательными), соединен-
ную с неподвижным основанием. Связи предполагаем идеальными
голономными, а кинематическую цепь — не содержащей ветвлений
и замкнутых контуров. С каждым звеном манипулятора связывается
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 1 29


