и, следовательно, определить
u
т
opt
(
t
) = (
n
т opt
(
t
)
, n
opt
(
t
)
, γ
opt
(
t
))
,
обеспечивающее попадание на ближнюю и дальнюю границы ОД в напра-
влении
ν
.
В работе [5] приведено важное свойство системы (38), (39), свидетель-
ствующее о существовании в задаче оптимизации особого участка управле-
ния, равного нулю (
n
особ
= 0
). Учитывая этот факт и замечание 4, приходим
к выводу, что задача максимизации расстояния системы (33)–(36) в напра-
влении
ν
имеет особый участок управления.
Решение краевой задачи (34)–(36), (38), (39) методом прогонки позволило
выявить следующие структуры управлений, приводящих на границы ОД.
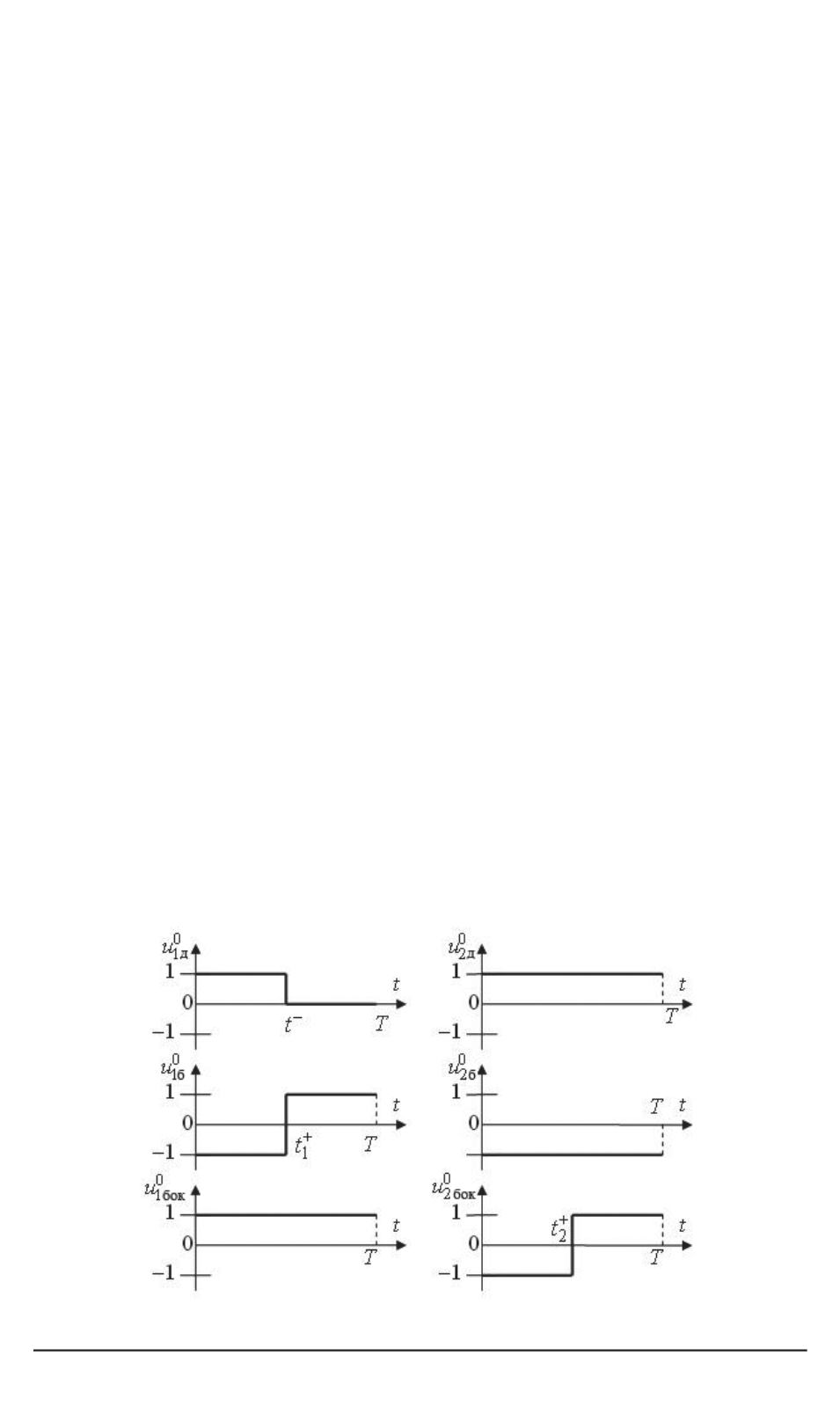
Структура управления, приводящего на дальнюю границу ОД, имеет вид
u
0
д
=
u
1
=
±
1
u
2
= 1
t
∈
[0
, t
−
]
u
1
= 0
u
2
= 1
t
∈
[
t
−
, T
]
,
(40)
где
t
−
— время перехода на особый участок управления
n
особ
= 0
.
Структура управления, приводящего на ближнюю границу ОД, имеет вид
u
0
б
=
u
1
=
∓
1
u
2
=
−
1
t
∈
[
0
, t
+
1
]
u
1
=
±
1
u
2
=
−
1
t
∈
[
t
+
1
, T
]
,
(41)
где
t
+
1
— момент времени переключения знака управления нормальной пере-
грузкой.
Структура управления, приводящего на боковую границу ОД, имеет вид
u
0
бок
=
u
1
=
±
1
u
2
=
−
1
t
∈
[
0
, t
+
2
]
u
1
=
±
1
u
2
= 1
t
∈
[
t
+
2
, T
]
,
(42)
где
t
+
2
— момент времени переключения знака управления тягой.
Структуры оптимальных управлений объекта, описываемого динамикой
(38) с начальными условиями (35) при наличии ограничений на управление
(39), приводящие на границы ОД, изображены на рис. 4.
Рис. 4. Структуры оптимальных управлений
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 4 91


