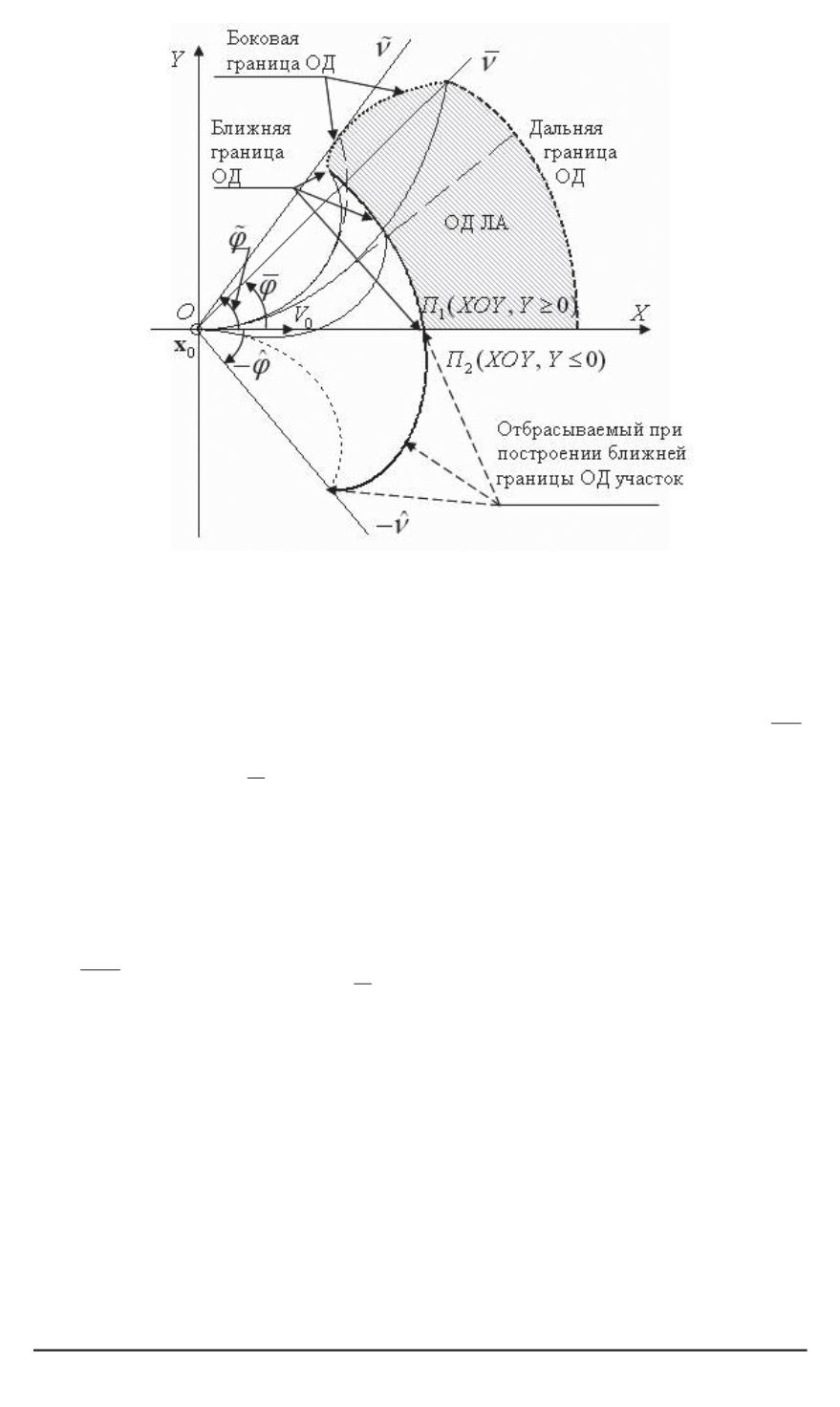
Рис. 5. Пример построения границ ОД
б)
ϕ
∈
[
−
ˆ
ϕ,
ˆ
ϕ
]
, где
ˆ
ϕ
определяется формулой (44).
Если условие выполняется, переходим к п. 4, иначе — к п. 5.
4. Формирование равномерной сети:
а
) густоты
l
по времени
t
−
перехода на особый участок управления нор-
мальной перегрузкой
n
особ
= 0
. Для каждого узла сети
t
−
i
= Δ
t
−
i
,
i
= 0
, l
,
t
−
i
∈
[0
, T
]
,
Δ
t
−
=
T
l
, выполняется построение точки
(
X
i
, Y
i
)
, принадле-
жащей участку дальней границы ОД. Структура управления определяется
выражением (40). Определение угла
ϕ
i
направления
ν
i
по формуле (45).
Запись направления
ν
i
во множество возможных направлений
N
. Запись
соответствующего управления во множество возможных управлений
U
.
б
) густоты
l
1
по времени
t
+
1
смены знака управления нормальной пере-
грузкой
n
(
t
)
со знака минус на знак плюс. Для каждого узла сети
t
+
1
i
= Δ
t
+
1
i
,
i
= 0
, l
1
,
t
+
1
i
∈
[0
, T
]
,
Δ
t
+
1
=
T
l
1
, выполняется построение точки
(
X
i
, Y
i
)
,
принадлежащей участку ближней границы ОД. Структура управления опре-
деляется выражением (41). Определение угла
ϕ
i
направления
ν
i
по формуле
(45). Запись направления
ν
i
во множество возможных направлений
N
при
условии
ϕ
i
0
. Данное условие обусловлено тем, что построение ближней
границы ОД для выбранной структуры управления нормальной перегрузкой
(с минуса на плюс) даст точки как в полуплоскости
Π
1
(
XOY, Y
0)
,
так и в полуплоскости
Π
2
(
XOY, Y
0)
. При этом точки, принадлежа-
щие полуплоскости
Π
2
, будут внутренними точками ОД, т.е. не лежащими
на границе ОД. Запись соответствующего управления во множество возмож-
ных управлений
U
.
Переход к п. 8.
5. Проверка принадлежности угла
ϕ
направления
ν
диапазону углов:
ϕ
∈
[
−
˜
ϕ,
˜
ϕ
]
. Если условие выполняется, переходим к п. 6, иначе — к п. 7.
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 4 95


