6. Вывод сообщения о том, что в течение заданного времени
T
в выбран-
ном направлении
ν
не обнаружено положения ЛА, принадлежащего ОД.
7. Формирование равномерной сети густоты
m
по времени
t
+
2
смены
знака управления тягой
n
т
(
t
)
со знака минус на знак плюс. Структура упра-
вления определяется выражением (42);
а
) для каждого узла сети
t
+
2
i
=
T i
m
,
i
= 0
, m
,
t
+
2
i
∈
0
,
˜
t
+
2
,
Δ
t
+
2
=
T
m
,
выполняется построение точки
(
X
i
, Y
i
)
, принадлежащей участку боковой
границы ОД;
б
) для каждого узла сети
t
+
2
i
=
T i
m
,
i
= 0
, m
,
t
+
2
i
∈
˜
t
+
2
, T
,
Δ
t
+
2
=
T
m
,
выполняется построение точки
(
X
i
, Y
i
)
, принадлежащей участку боковой
границы ОД. Определение угла
ϕ
i
направления
ν
i
по формуле (45). Запись
направления
ν
i
во множество возможных направлений
N
. Запись соответ-
ствующего управления во множество возможных управлений
U
.
8. Если направление
ν
принадлежит полуплоскости
Π
2
(
XOY, Y
0)
,
т.е. угол
ϕ <
0
, то производим смену знака элементов множества
N
и эле-
ментов
u
1
i
(
t
)
множества
U
.
9. Поиск угла
ϕ
i
направления
ν
i
∈
N
, удовлетворяющего условию
|
ϕ
−
ϕ
i
| →
min
. Вывод управления
[
u
1
i
(
t
)
, u
2
i
(
t
)]
∈
U
, соответствующего
выбранному направлению.
Структуризация пространственной задачи получения ОД с учетом
тяги на основе экстремальных свойств
γ
(
t
) =
const
и комбинации ре-
лейных и особых структур
n
T
, n
.
Как было показано ранее, экстремаль,
обеспечивающая оптимальное движение системы (2), является плоской, что
позволяет свести пространственную шестимерную систему к ранее рассмо-
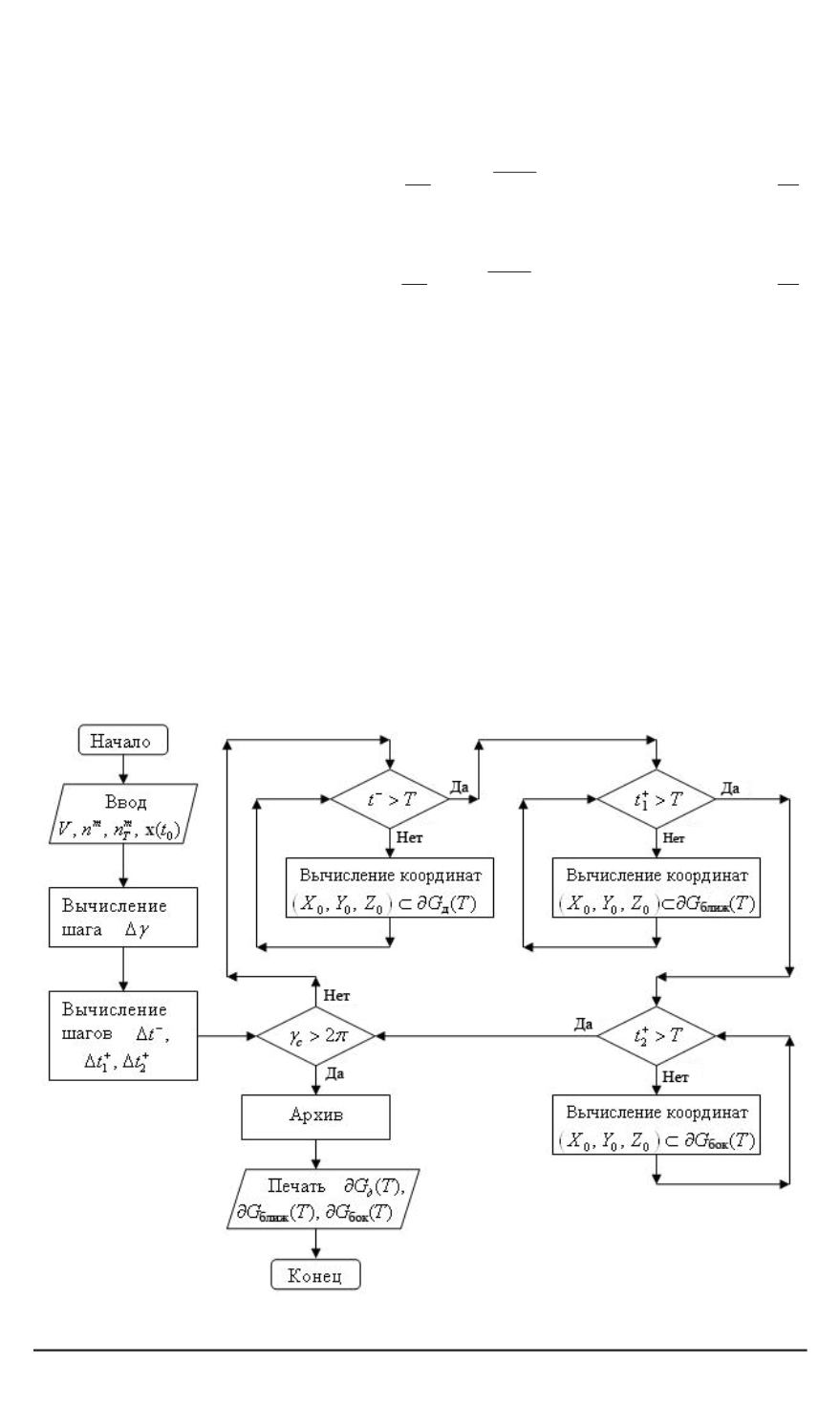
Рис. 6. Блок-схема алгоритма формирования границ пространственной ОД ЛА
96 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2007. № 4


