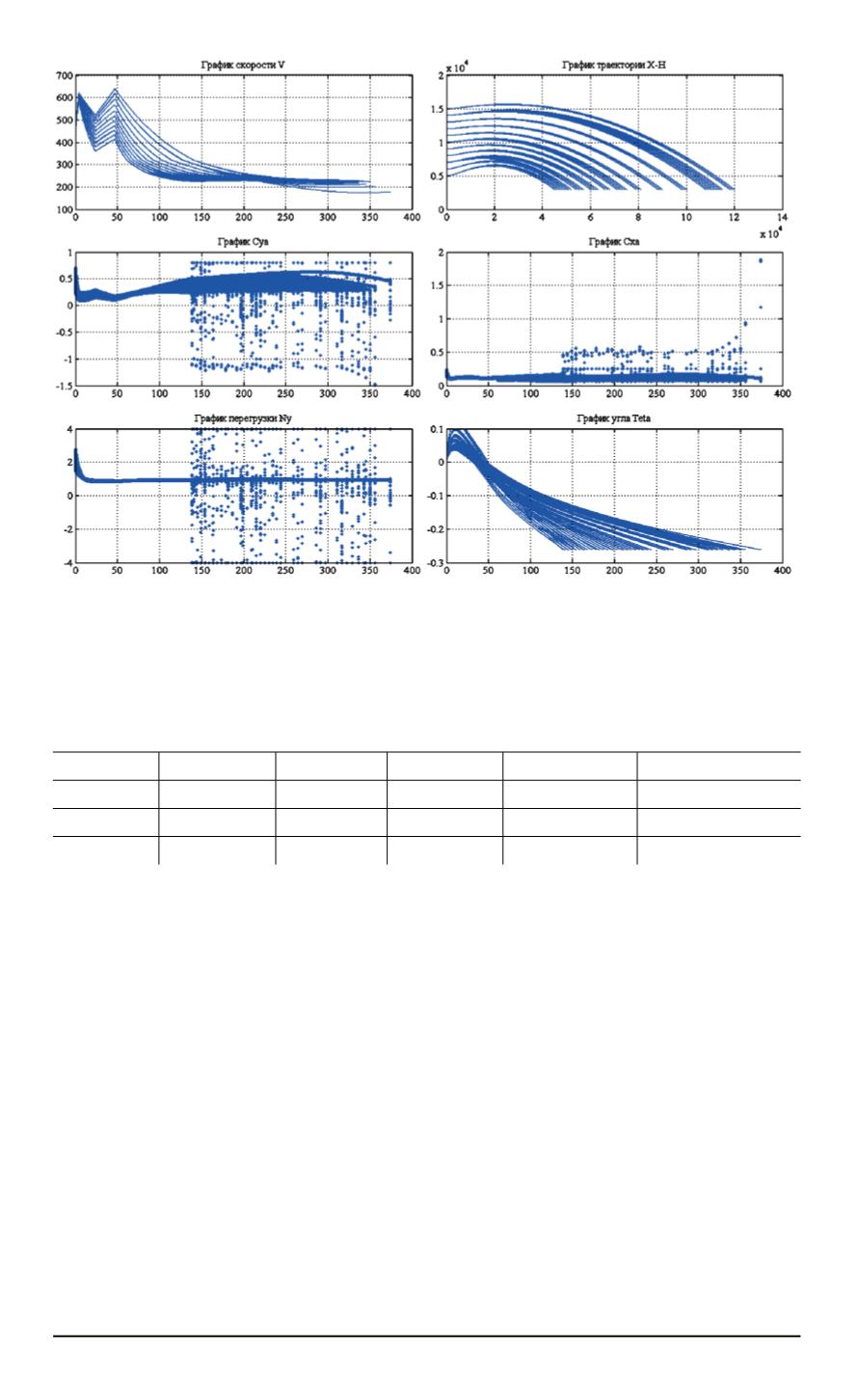
Рис. 10. Графики скорости, движения и промежуточных сигналов ОУ при фор-
мировании дальней границы зоны применимости ОУ для простой программы
Таблица 6
Расчетные данные точки зоны применимости ОУ при варьировании
программы
Θ
z
для
H
0
= 12 000
м
H
0
,
м
X
T
,
м
T
1
,
с
V
1
,
м/с
Θ
T
,
град
Δ
X
1
,
м
12000
121000
351,23
237,79
– 14,998
2,9657e– 008
12000
122000
366,14
226,98
– 14,995
– 7,7461e– 007
12000
123000
414,93
135,16
– 16,027
– 1567,8
После определенного момента времени в траектории ОУ начина-
ется перегрузка по коэффициенту
C
y
a
из-за невозможности выхода в
точку начала маневра второго участка. Теоретически это можно отсле-
дить по характеру изменения скорости и отбрасывать заведомо непри-
емлемые варианты автоматически.
Путем уменьшения высоты
H
z
начала второго участка движения
удается повысить дальность полета ОУ на 1. . . 2 км при текущей вы-
соте пуска.
Построение дальней границы зоны применимости ОУ.
Сле-
дует отметить, что скорость схода ОУ с носителя зависит от высоты
пуска. На высоте, ниже определенной, скорость пуска уменьшается с
заданной
V
0
= 443
м/с (начальные условия математической модели) до
1 М. Для расчетов в первом приближении зададимся линейной зави-
симостью такого изменения до минимально возможной высоты пуска
30 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


