Θ
1
=
−
15
◦
для обеспечения меньшего снижения скорости ОУ в про-
цессе полета.
Второй
,
финальный
,
участок полета
— движение ОУ с нарастани-
ем внешнего воздействия с небольших значений для основного участка
полета — в нашем случае
Θ
1
=
−
15
◦
— до требуемого
Θ
T
=
−
90
◦
за
конечное время
T
z
= 20
с.
При этом начальные данные для системы ДУ движения на втором
участке траектории ОУ берутся как конечные данные движения по
первому участку полета ОУ.
Исследование второго, финального, участка траектории ОУ.
Проведем исследование второго участка траектории ОУ. Базовый
угол подхода к началу маневра
Θ
z
=
−
15
◦
,
высота начала маневра
H
z
= 3000
м.
При постоянном воздействии
Θ
z
=
−
15
◦
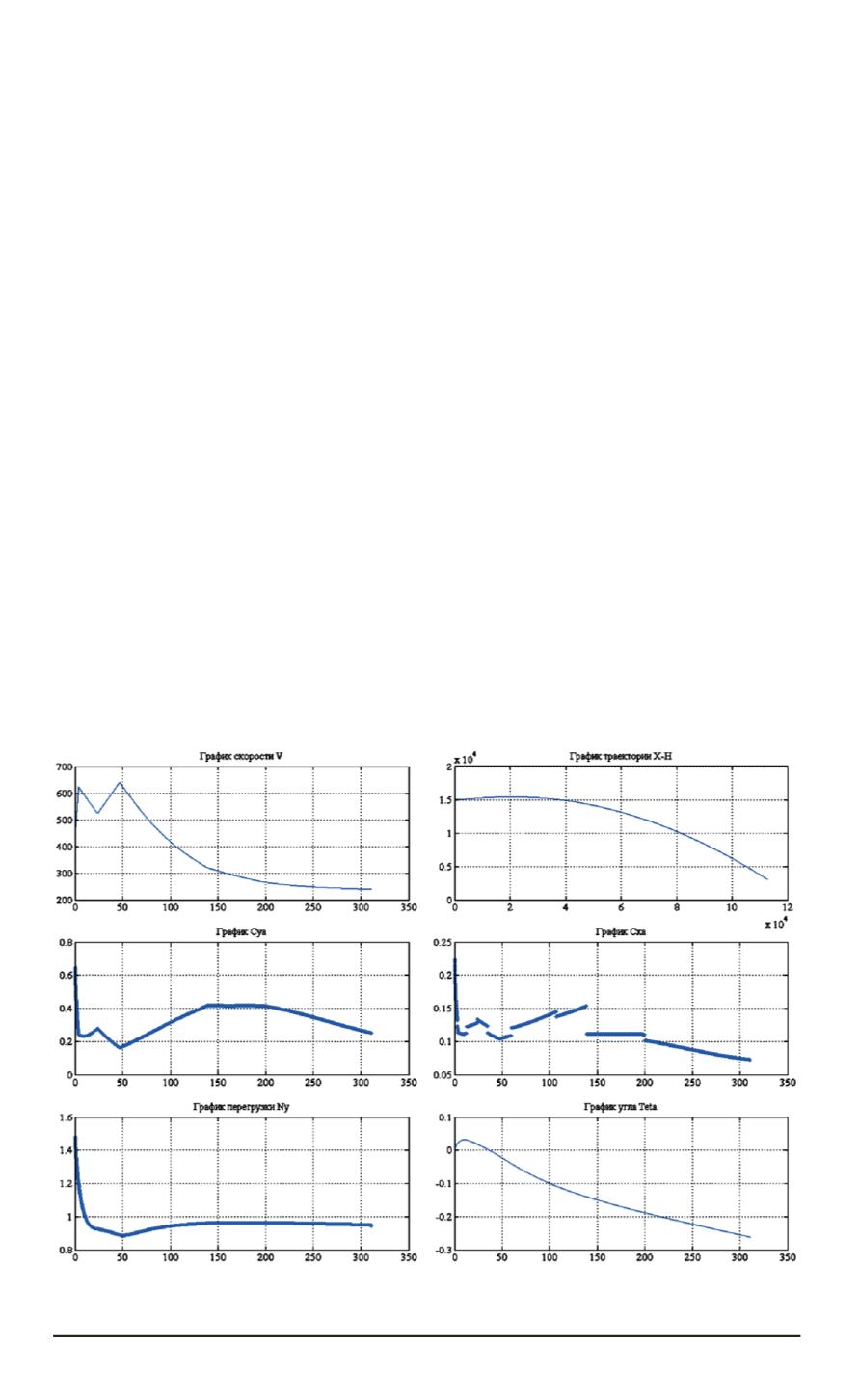
траектория движения ОУ
на первом участке полета будет иметь вид, представленный на рис. 6.
По результатам данного эксперимента примем скорость подхода
ОУ к началу второго участка
V
z
= 240
м/с и рассчитаем оптимальный
вариант наведения ОУ, когда снижение скорости ОУ в процессе ма-
невра выхода в ТН будет минимальным либо приближаться к границе
200 м/с.
Как было показано ранее, влияние угла подхода
Θ
z
ко второму
участку движения ОУ на качество наведения незначительно, поэтому
необходимо исследовать два основных параметра маневра:
Рис. 6. Графики скорости, движения и промежуточных сигналов ОУ
26 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


