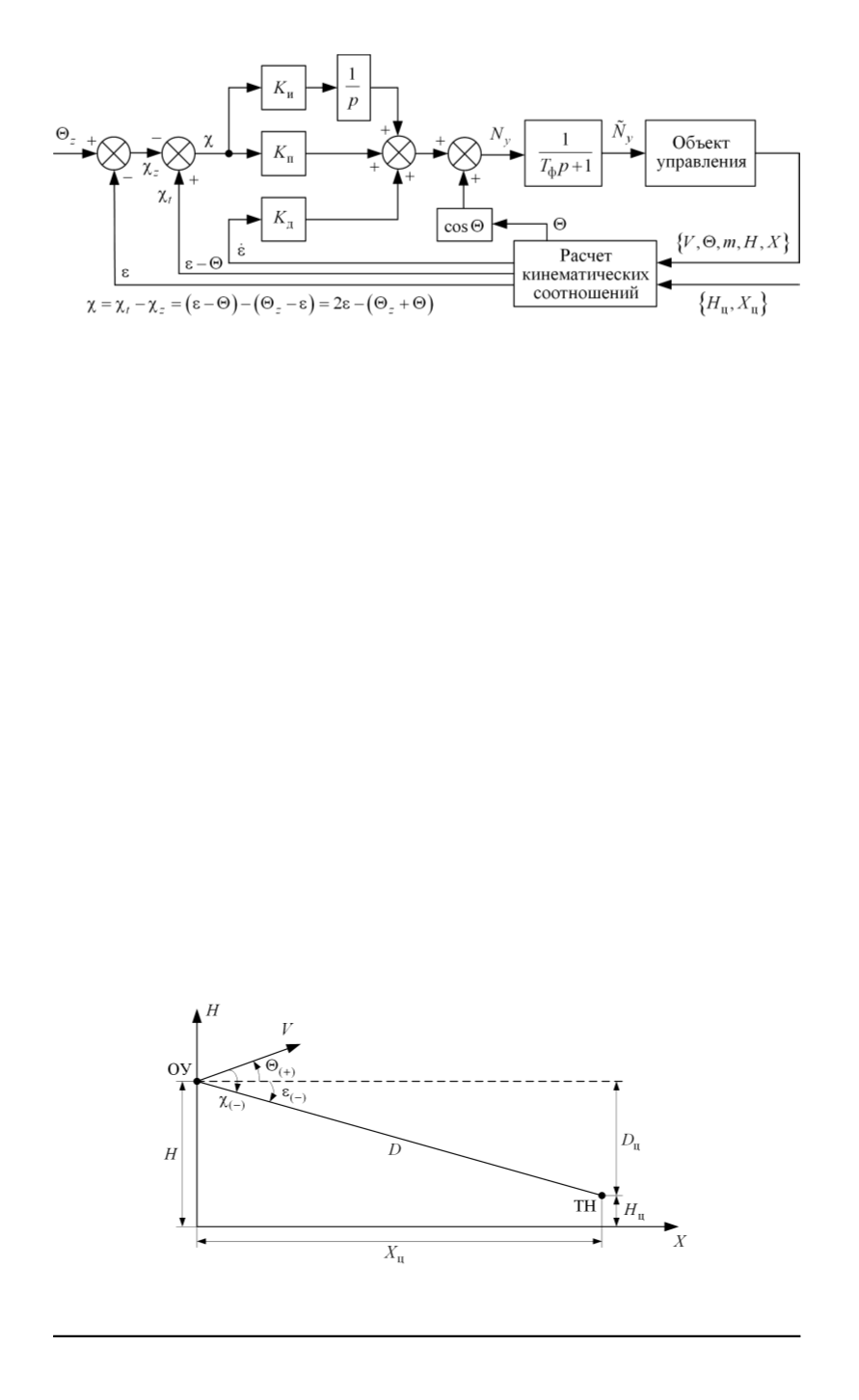
Рис. 1. Структурная схема закона наведения
сигнал перегрузки, подаваемый на ОУ, формируется согласно зависи-
мости
N
y
=
K
д
˙
ε
+
K
п
χ
+
K
и
Z
χdt
+ cos Θ
.
Структурная схема закона наведения представлена на рис. 1.
Сигнал, формирующийся после обратной связи, имеет следующий
вид:
χ
=
χ
t
−
χ
z
= (
ε
−
Θ)
−
(Θ
z
−
ε
) = 2
ε
−
(Θ
z
+ Θ)
,
где
Θ
z
— сигнал внешней программы-воздействия вывода ОУ на тра-
екторию с более высокой потенциальной энергией для достижения
необходимой дальности полета, который в общем виде является пере-
менным в процессе движения ОУ. В дальнейших исследованиях фор-
мы данного воздействия принимается комбинирование постоянных и
линейных участков на различных участках полета ОУ. Определение
угловых переменных, использующихся в схеме (см. рис. 1), приведено
на рис. 2.
Для отражения в модели изделия динамики контура стабилизации
(инерционность) введено апериодическое звено с постоянной времени
T
ф
= 0
,
3
с.
Рис. 2. К определению углов, использующихся в модели наведения ОУ в ТН
20 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5


