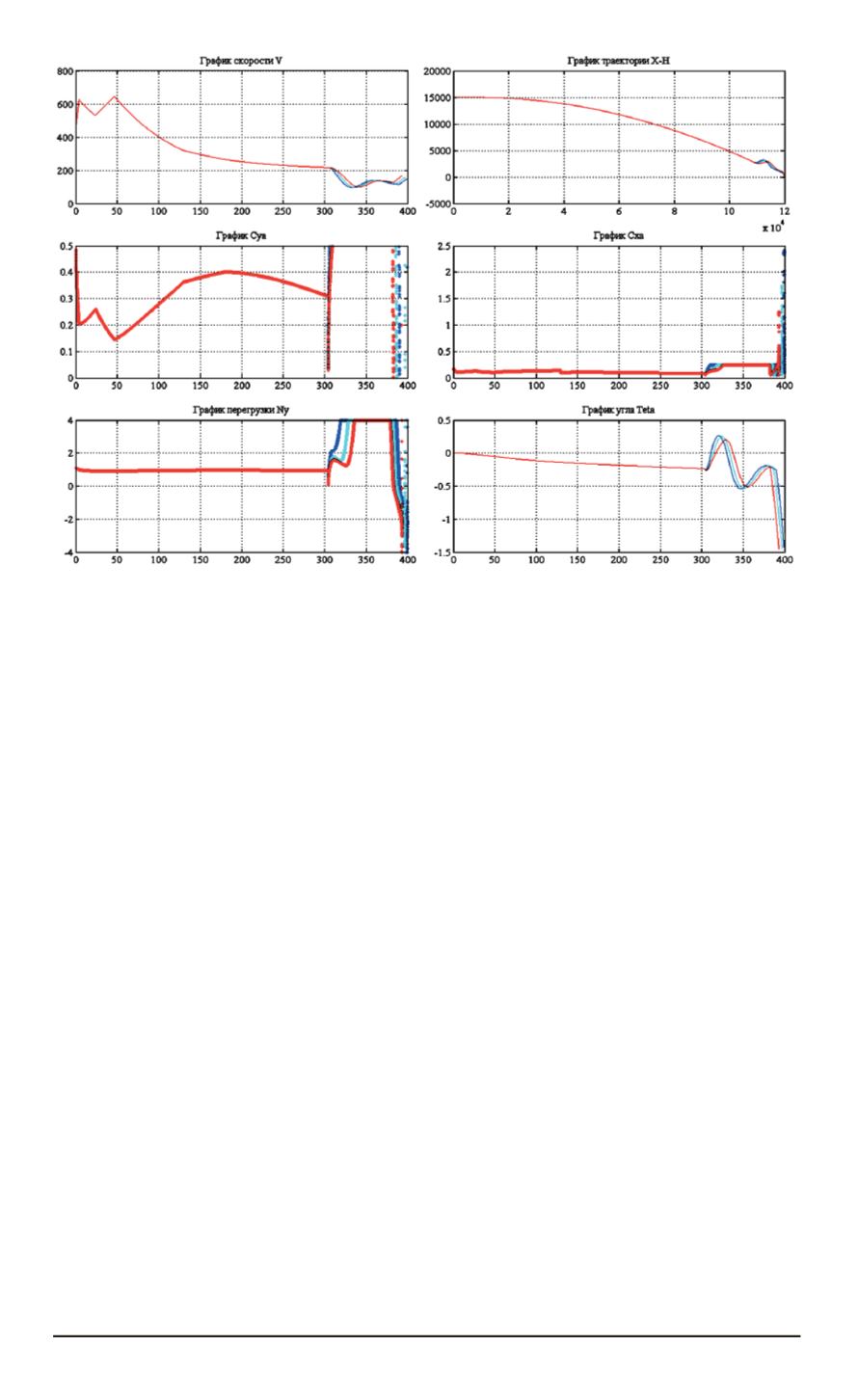
Рис. 5. Графики скорости, движения и промежуточных сигналов ОУ при обес-
печении вертикального выхода в ТН с плавным изменением внешнего воздей-
ствия
зом, для снижения перегрузки и более плавного изменения скорости
ОУ при маневре выхода в ТН.
2. Если проанализировать график по перегрузке
N
y
и углу
Θ
,
то
чтобы повысить точность выхода в ТН, необходимо изменение по
Θ
z
проводить на оптимальном горизонтальном расстоянии до ТН
X
z
opt
,
так как при наведении точно в ТН выход на маневр осуществляется
слишком далеко. Следовательно, необходимо обеспечивать наведение
ОУ не в исходную ТН, а в заданную точку начала маневра по измене-
нию
Θ
z
.
Как результат проведенных исследований, предлагается следу-
ющий алгоритм наведения с разбиением траектории полета ОУ на
участки, для каждого из которых будет формироваться собственная
программа внешнего воздействия. Дальнейшие исследования процес-
сов наведения ОУ проведем при повышенном внешнем воздействии
Θ
z
=
−
25
◦
.
Разработан вариант наведения ОУ с разделением на два участка
траектории следующим образом.
Первый
,
основной
,
участок полета
— движение ОУ до момента
смены внешнего воздействия с небольших значений до требуемого
Θ
T
=
−
90
◦
.
Предлагается базовым вариантом программного воздей-
ствия принять на начальном участке полета (работа ступеней двига-
теля ОУ)
Θ =
−
25
◦
,
затем проводится постепенное его снижение до
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5 25


