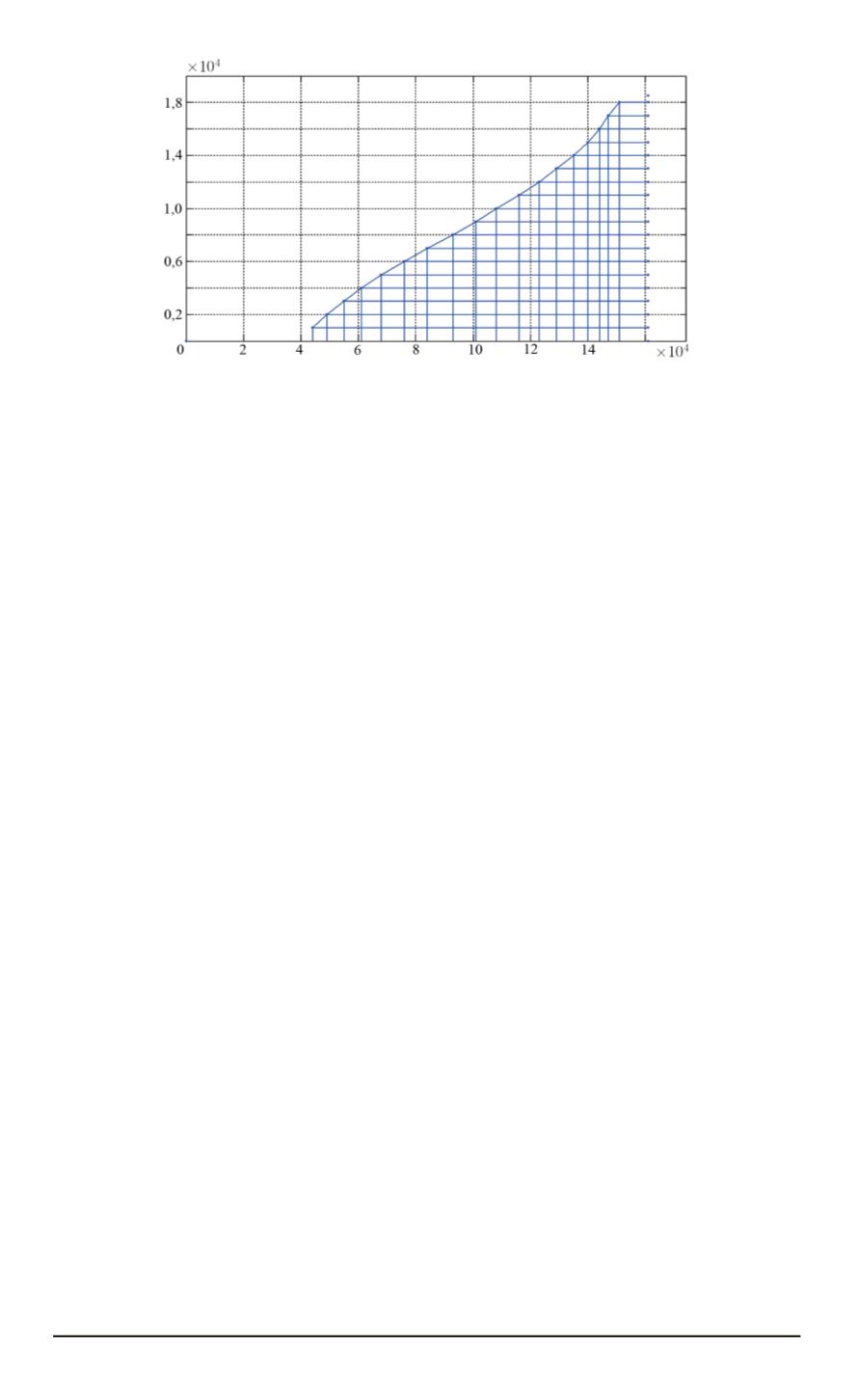
Рис. 13. График зоны применимости ОУ в координатах
H
0
−
X
T
для сложной
программы внешнего воздействия
Многокритериальная параметрическая оптимизация траек-
торного управления.
Выше было проведено исследование в форме
моделирования движения ОУ для определения допустимого, с учетом
ограничения, траекторного управления. Далее предлагается методика
многокритериальной параметрической оптимизации, которая позво-
лила бы достичь оптимального качества наведения ОУ в ТН. Следует
отметить, что при предложенном ранее разбиении траектории ОУ на
участки движения оптимизацию следует рассматривать в основном
только для первого участка траектории, так как именно на нем опре-
деляется максимальная дальность и высота пуска ОУ.
Метод идеальной точки.
Ранее были предложены критерии, по
которым можно судить о качестве траекторного управления:
1) максимизация скорости подхода
V
T
к ТН;
2) минимизация промаха ОУ
X
T
−
X
ц
к ТН;
3) максимизация угла подхода
Θ
T
к ТН.
Для формирования показателей качества необходимо учитывать,
что все показатели должны быть приведены либо к минимизации,
либо к максимизации качества управления [5]. Рассмотрим задание
показателей качества для случая минимизации. В этом случае
J
1
=
X
T
−
X
ц
;
J
2
=
−
V
T
;
J
3
= Θ
T
.
Метод идеальной точки состоит в отыскании на множестве Парето
точки, ближайшей к утопической точке [6, 7]. В качестве координат
такой утопической точки выбирается сочетание наилучших значений
вектора критериев (как правило, эта точка при заданных ограничениях
не достигается; поэтому ее и называют утопической) [1].
Рассмотрим задачу минимизации векторного показателя
J
=
{
J
1
, J
2
, . . . , J
m
}
,
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 5 33


