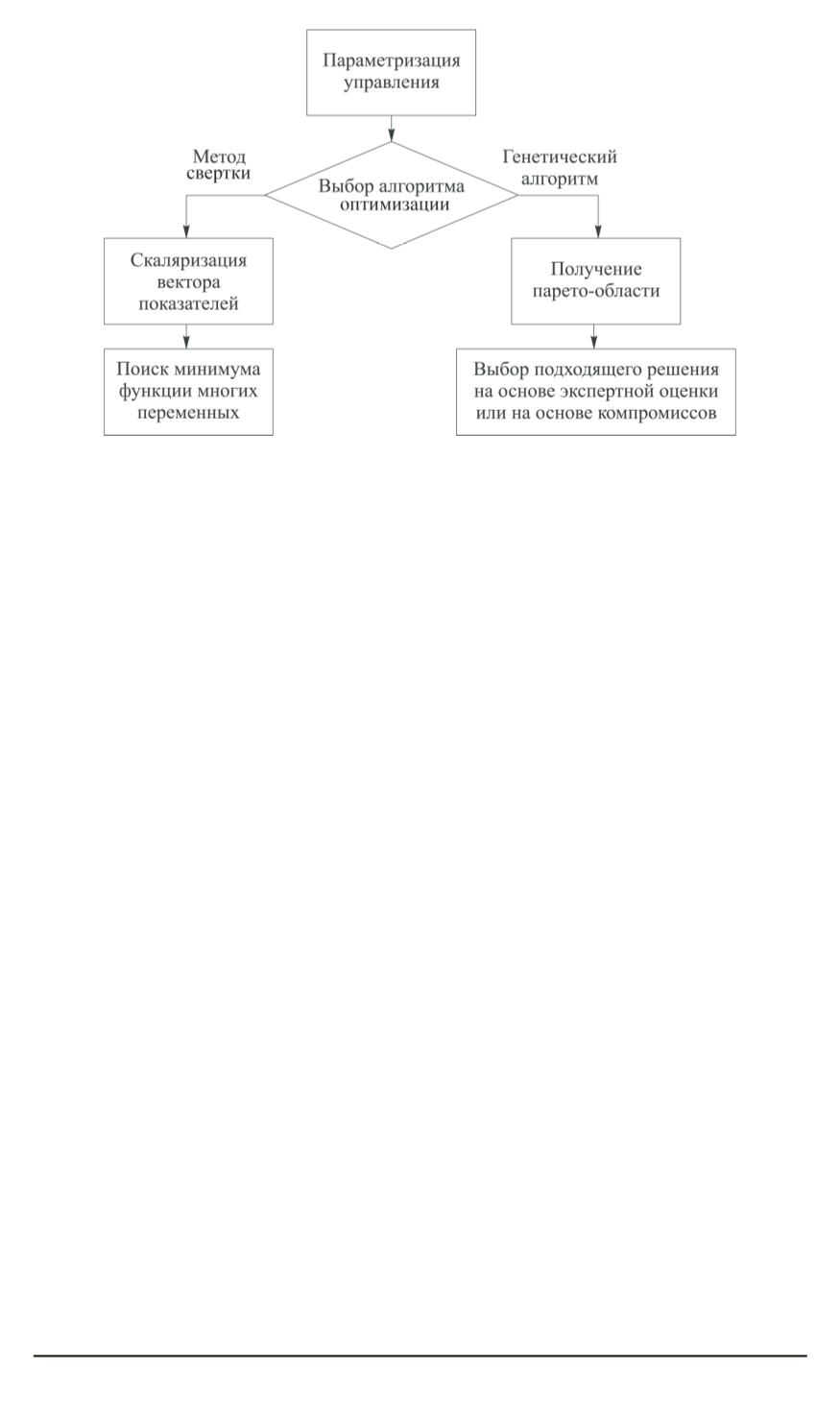
Рис. 2. Общая структурная схема алгоритмов этапа МО ПУТ
представлена на рис. 2. Параметризация управления заключается в
выборе набора параметров, позволяющих описать вид программно-
го управления
u
(
t
)
как набора значений времени. Например, задаются
ключевые моменты времени
t
i
, для каждого из которых будет опреде-
ляться значение параметра
p
i
(
t
i
)
с последующей интерполяцией этих
точек сплайнами.
В исходной постановке задача является многокритериальной, т.е.
имеется три показателя эффективности
J
1
,
. . . , J
3
. Если применяется
метод свертки, то формируется линейная свертка показателей с весо-
выми коэффициентами
α
i
:
Φ
s
=
l
X
i
=1
α
i
×
J
i
н
;
l
X
i
=1
α
i
= 1
,
0
≤
α
i
≤
1
, l
= 3
,
где
J
i
н
— нормированное значение показателя.
Далее задача заключается в поиске экстремума функции
Φ
s
, для
чего можно использовать встроенную в MATLAB функцию поиска
минимума скалярной функции нескольких переменных с ограничени-
ями, начиная с начального приближения fmincon.
При применении ГА учитывается векторная форма показателей без
скаляризации с построением парето-границы и последующим поис-
ком наиболее подходящего решения на основе экспертной оценки или
идеальной точки (4). На первом этапе экспертная процедура выпол-
няет предварительный отсев заведомо неподходящих точек парето-
границы — решений, которые по тем или иным показателям не удовле-
творяют требованиям, предъявляемым к задаче. Второй этап проведе-
ния оценки — выбор единственного решения, которое лучше отражает
эффективность решения рассматриваемой задачи.
64 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 3


