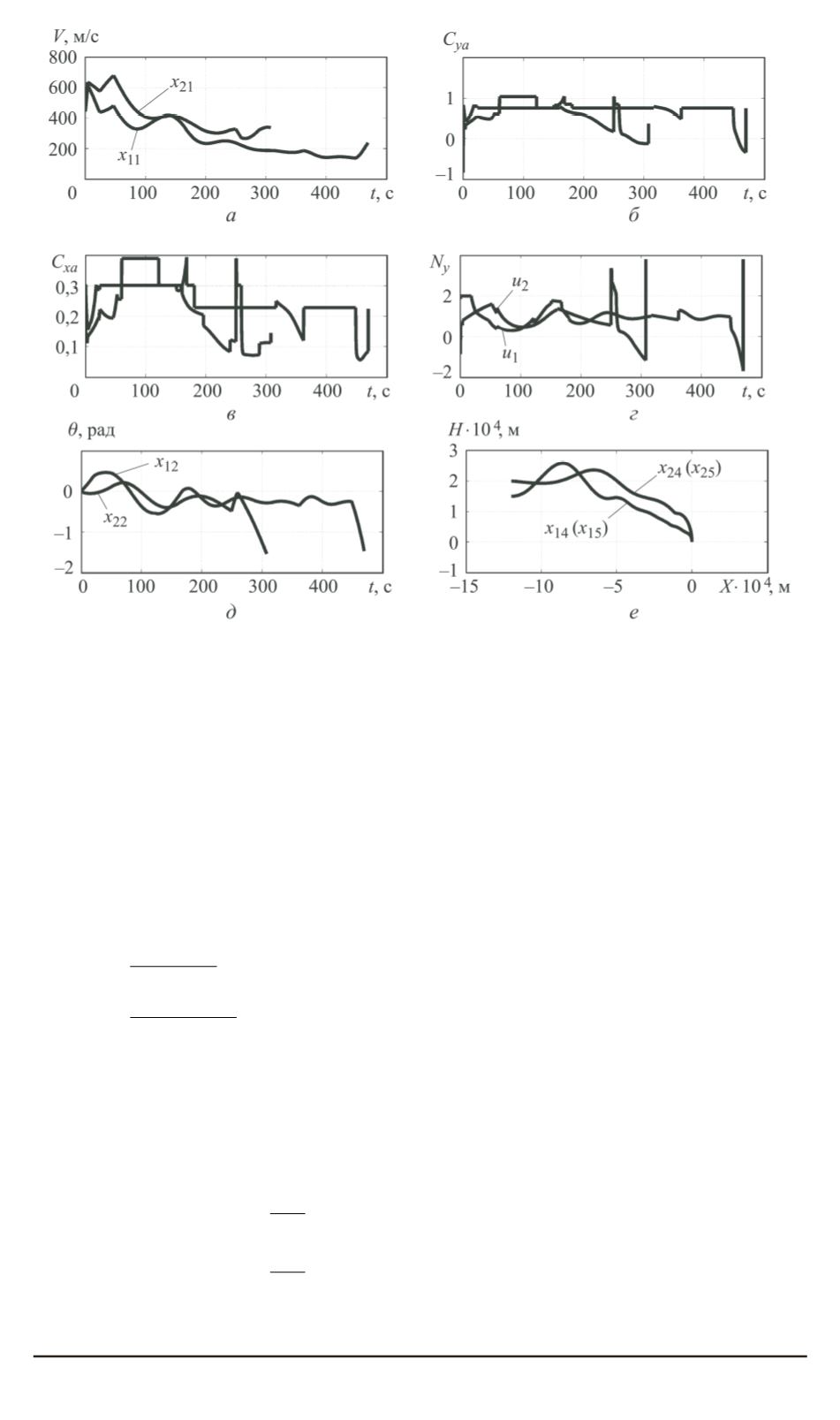
Рис. 3. Результаты МО ПУТ в виде зависимостей скорости (
а
), аэродинамиче-
ских коэффициентов (
б
,
в
), перегрузки (
г
) и угла (
д
) от времени и зависимость
высоты от дальности (
е
)
Из соотношения (33) следует, что
x
=
y
k
+
x
k
;
(35)
˙
x
= ˙
y
k
+ ˙
x
k
.
(36)
После замены переменных в уравнениях (33)–(36) получаем следую-
щую систему в отклонениях:
˙
y
k
1
=
1
y
k
3
+
x
k
3
(
Pg
−
C
xa
q
k
S
−
(
y
k
3
+
x
k
3
)
g
sin (
y
k
2
+
x
k
2
) )
−
˙
x
k
1
;
˙
y
k
2
=
g
(
y
k
1
+
x
k
1
)
(
u
−
cos (
y
k
2
+
x
k
2
))
−
˙
x
k
2
;
˙
y
k
3
=
f
т
−
˙
x
k
3
;
˙
y
k
4
= (
y
k
1
+
x
k
1
) sin (
y
k
2
+
x
k
2
)
−
˙
x
k
4
;
˙
y
k
5
= (
y
k
1
+
x
k
1
) cos (
y
k
2
+
x
k
2
)
−
˙
x
k
5
,
(37)
где
˙
x
k
1
=
1
x
k
3
(
Pg
−
C
xa
q
k
S
−
x
k
3
g
sin
x
k
2
) ;
˙
x
k
2
=
g
x
k
1
(
u
k
−
cos
x
k
2
) ; ˙
x
k
3
=
f
т
;
˙
x
k
4
=
x
k
1
sin
x
k
2
; ˙
x
k
5
=
x
k
1
cos
x
k
2
;
(38)
66 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 3


