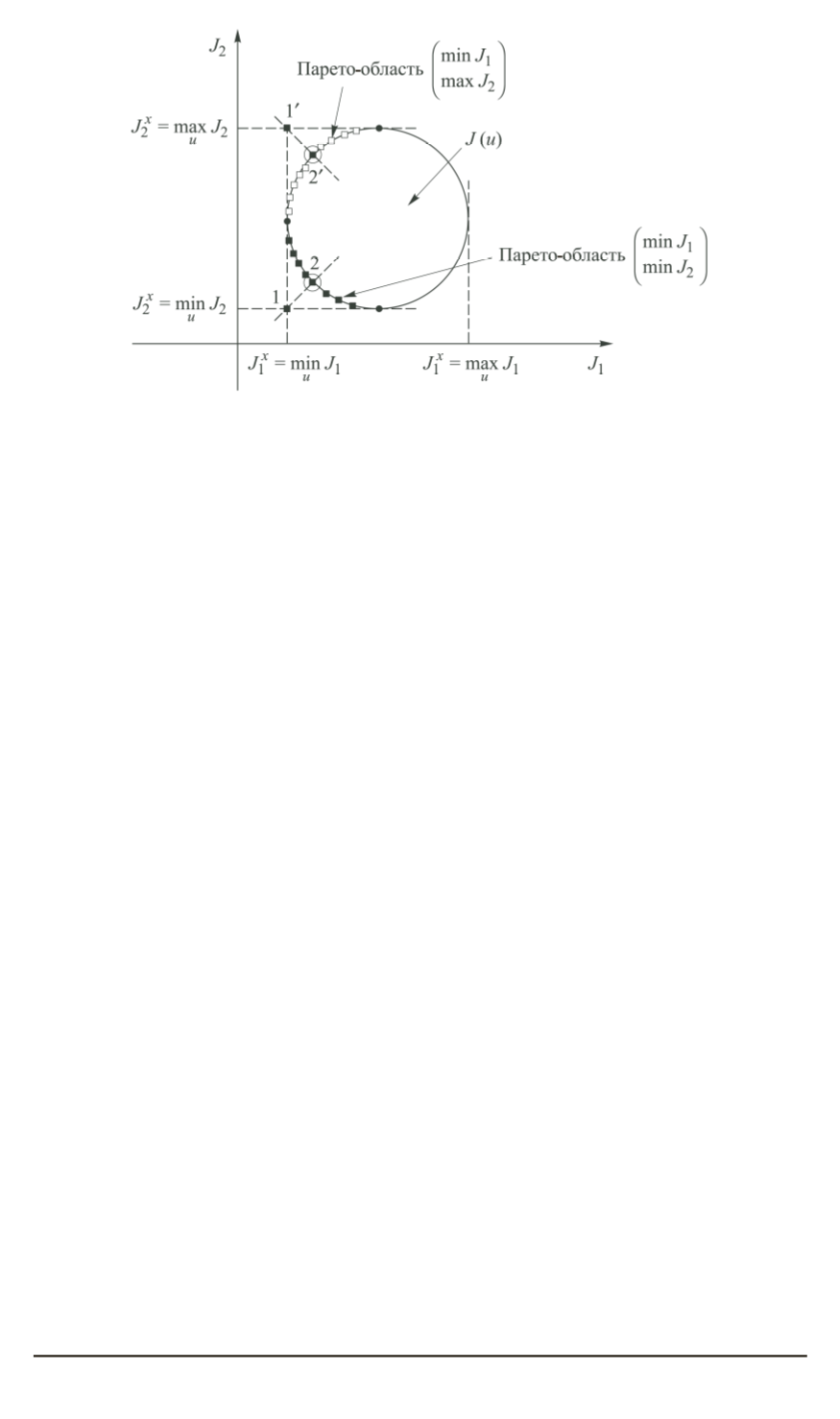
Рис. 1. Парето-области при
l
= 2
с точками компромисса с учетом вариации
постановки:
1 (1
0
) — идеальные точки; 2 (2
0
) — искомые решения (точки компромисса) по вектору
показателей на парето-области
программирование, численные методы, в частности, в форме гене-
тических алгоритмов при приближенной аппроксимации управления
вектором распределенных во времени параметров.
Применяя один из перечисленных выше подходов многокритери-
альной программной оптимизации, можно получить множество из
N
решений на множестве начальных условий. Для этого могут быть ис-
пользованы прямые методы, методы скаляризации, методы на основе
компромиссов. Пусть без ограничения выбора подходов это будет один
из методов получения компромиссов на основе недостижимой идеаль-
ной точки, с помощью которого на парето-области показателей можно
выбрать точку, самую близкую к идеальной точке, поэтому будет ском-
пенсирована неопределенность выбора на парето-области (рис. 1).
Вектору показателей на парето-области при заданных начальных
условиях
x
k
(
t
0
)
,
k
= 1
, . . . , N,
соответствует оптимальное программ-
ное управление
u
k
opt
в случае решения задачи на основе функции
Салуквадзе [11]:
min[(
J
1
−
J
1
)
2
+ (
J
2
−
J
2
)
2
]
→
u
=
u
k
opt
.
(4)
Окончательно получим множество оптимальных программных упра-
влений
u
k
opt
(
t
)
,
k
= 1
, . . . , N,
и соответствующих траекторий
x
k
(
t
)
,
k
= 1
, . . . , N.
Получение стабилизирующих компонент МПУ.
Общий вид
структуры МПУ на конечном интервале
[
t
0
, t
k
]
имеет вид [1, 6, 7]
u
(
x, t
) =
u
m
(
x, t
) +
N
X
k
=1
v
(
y
k
(
t
))
,
y
k
=
x
−
x
k
, t
0
≤
t
≤
t
k
.
(5)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2014. № 3 57


