но и от того
,
на какой скорости оно происходит
,
поэтому аргументом
функции
p
l
является проскальзывание относительное
:
s
l
11
=
|
V
пр
l
11
|
|
V
нат
l
11
|
.
Если режим скольжения возник из
-
за процессов
,
происходящих
вдоль оси
l
,
то он существует и в направлении оси
q
.
Трение качения
также заменяется трением скольжения
,
которое не может компенсиро
-
вать поперечные силы
,
и корпус ТС начинает поворачиваться
(
ψ
6
= 0
),
т
.
е
.
возникает скорость
V
y
;
поэтому относительное проскальзывание
имеет вид
s
l
ij
=
¯ ¯ ¯
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
−
Ω
y
ij
R
¯ ¯ ¯
¯ ¯ ¯
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
¯ ¯ ¯
,
s
q
ij
=
¯ ¯ ¯
−
V
A
ij
x
sin
ψ
+
V
A
ij
y
cos
ψ
¯ ¯ ¯
¯ ¯ ¯
V
A
ij
x
cos
ψ
−
V
A
ij
y
sin
ψ
¯ ¯ ¯
.
(
2
)
При использовании тормозных колодок имеем
s
l
11
= 0
. . .
1
.
При
малых скольжениях
(
т
.
е
.
в наиболее распространенном случае
)
p
l
(
s
l
11
)
является линейной функцией
.
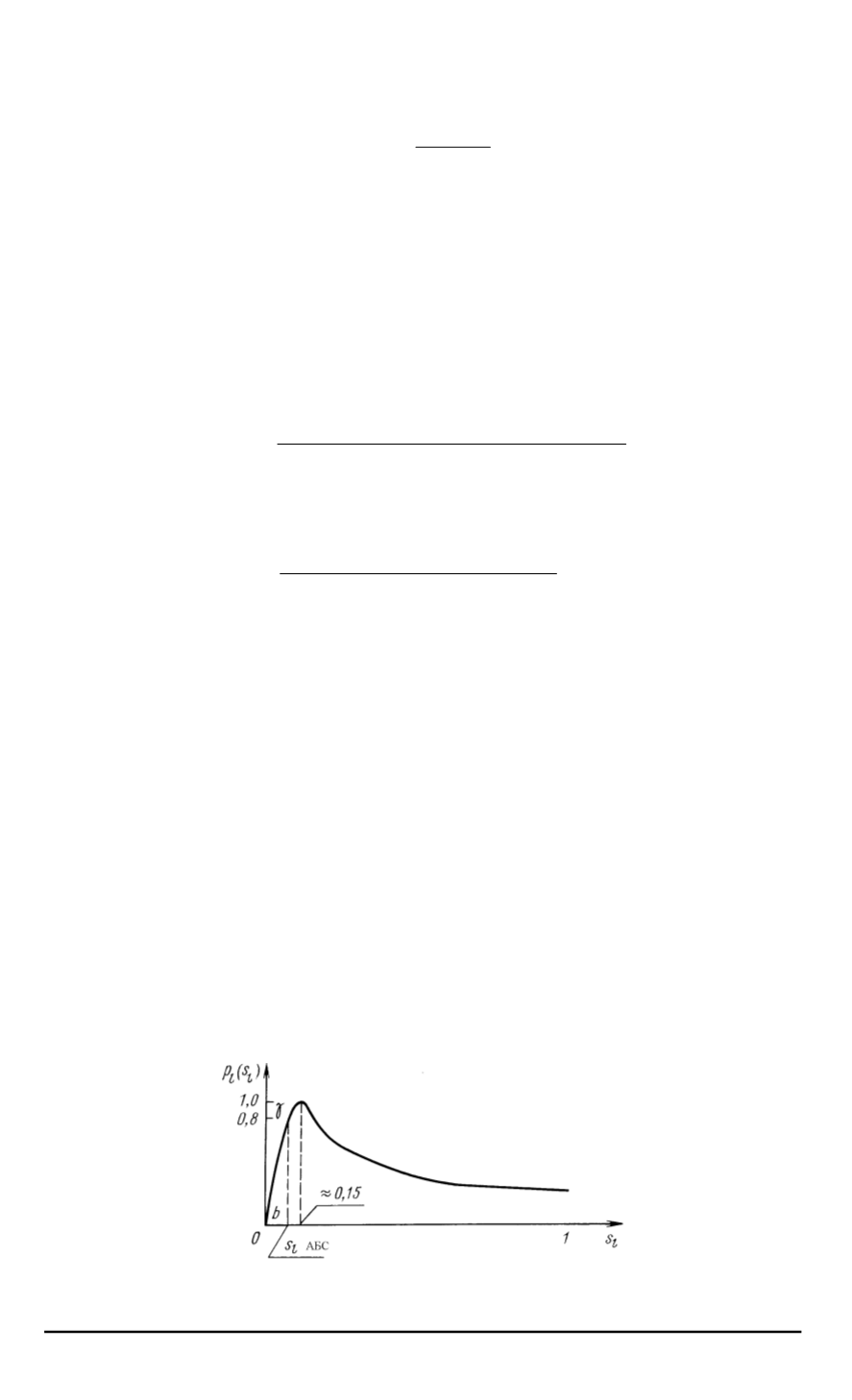
Типовой вид функции
p
l
(
s
l
11
)
предста
-
влен на рис
. 4.
В результате торможения в режиме качения с проскальзыванием на
колесе образуется вязкий слой
,
уменьшающий эффективность тормо
-
жения
(
см
.
максимум функции
p
l
(
s
l
)
на рис
. 4).
Приведенные на рис
. 4
экспериментальные данные соответствуют
аналитическому выражению
[8]
p
l
(
s
l
ij
) = (
a
+
bs
l
ij
)
e
−
cs
l ij
+
d,
где
a, b, c, d
—
константы
,
зависящие от пар трения
.
Рис
. 4.
Зависимость силы трения от относительного проскальзывания
108 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Приборостроение
”. 2003.
№
4


