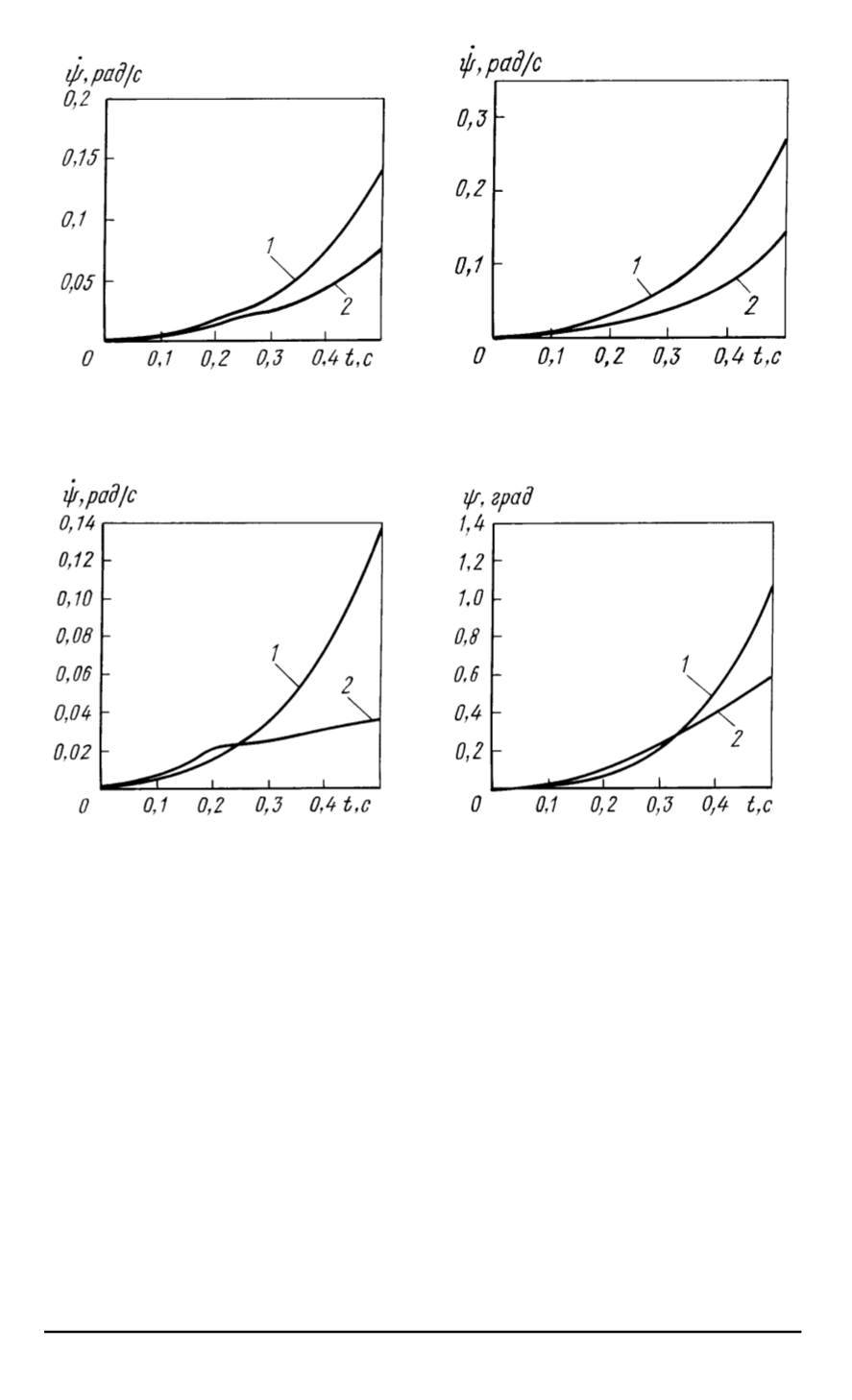
Рис
. 6.
Влияние рессор
,
δC
= 0
:
1
—
полные модели
,
2
—
модели без рес
-
сор и пневматиков
Рис
. 7.
Влияние нецентровки
:
1
—
модели при
δC
= 0
,
2
—
вторая мо
-
дель при
δC
= 0
,
5
м
Рис
. 8.
Угловые скорости рыскания
:
1
—
полная модель
,
2
—
упрощенная
модель
Рис
. 9.
Углы рыскания
:
1
—
полная модель
,
2
—
упрощенная
модель
является микстом
:
µ
= ∆
11
−
∆
22
.
Результаты моделирования при
µ
= 0
,
9
представлены на рис
. 6–9.
Выводы
.
В упрощенной и полной моделях с высокой степенью точ
-
ности совпадают значения
ψ
и
˙
ψ
в начале движения
,
что подтверждает
правильность сделанных предположений
.
Модель
,
сформированная на
основе уравнений Лагранжа
II
рода
,
позволяет
,
в отличие от модели
,
основанной на принципе Даламбера
,
учитывать смещения центра масс
ТС относительно геометрического центра
.
Полные математические модели движения ТС описываются систе
-
мами нелинейных дифференциальных уравнений
,
решение которых в
аналитическом виде не представляется возможным
.
118 ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Приборостроение
”. 2003.
№
4


