нии
—
R
.
Примем систему отсчета
A
ij
x
A
ij
y
A
ij
z
A
ij
,
связанную с дис
-
ками колес
(
рис
. 2).
Символ
z
A
ij
A
ij
o
означает координату
z
A
ij
o
точки
A
ij
;
здесь и далее
“o”
в индексе точки означает ее положение
,
которое она
займет при отсутствии нагрузок
.
Точка
A
ij
лежит на пересечении оси вращения колеса
ij
с продоль
-
ной плоскостью симметрии его пневматика
,
совпадающей с плоско
-
стью
A
ij
o
x
A
ij
o
z
A
ij
o
,
ось
A
ij
y
A
ij
совпадает с осью вращения колеса
.
Точ
-
ку крепления рессоры
ij
к корпусу обозначим
A
к
ij
.
Конструкция ТС
такова
,
что
A
к
ij
o
совпадает с
A
ij
o
;
D
3
=
D
1
;
D
2
=
R
+
D
1
;
B
1
=
B
2
(
см
.
рис
. 1).
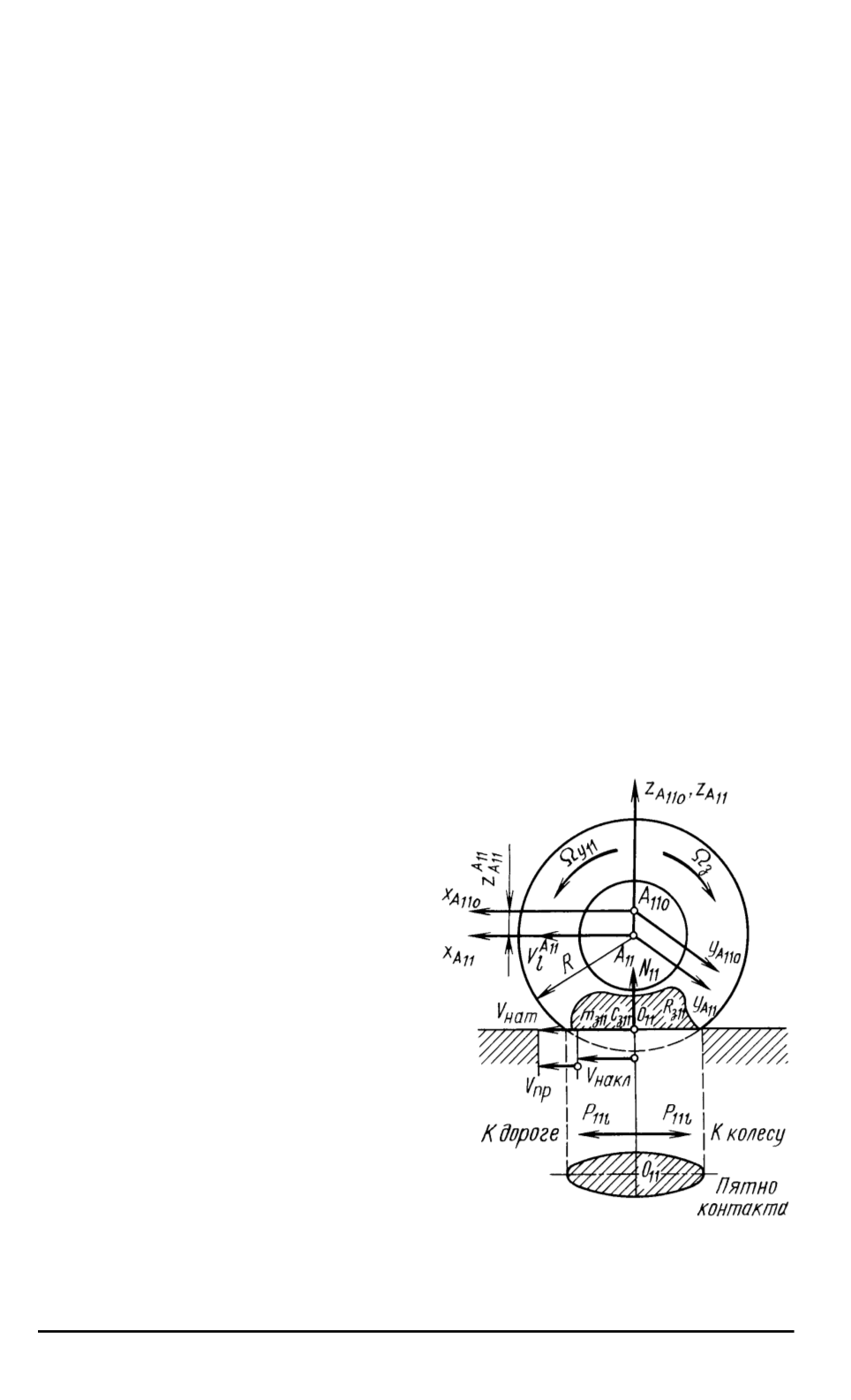
В ненагруженном состоянии автомобиля каждое колесо касается
опорной плоскости в единственной точке
O
ij
(
см
.
рис
. 1, 2).
Враще
-
ние колеса
ij
вокруг своей оси вращения задается абсолютной угловой
скоростью
Ω
у
ij
.
Центры масс ТС и неподрессоренной части обозначим точками
С
ТС
,
С
н
соответственно
.
Точка
О
—
проекция
С
ТС
на опорную плоскость
(
плоскость
О
11
О
12
О
22
),
О
ξηζ
—
неподвижная система отсчета
.
Плос
-
кость
О
ξη
принадлежит опорной плоскости
,
ось
О
ζ
вертикальна
,
ось
О
ξ
направлена по ходу движения вдоль
V
co
—
проекции начального
вектора скорости центра масс ТС на опорную плоскость
.
Точка
С
явля
-
ется проекцией
С
ТС
на плоскость
,
проходящую через оси колес
.
В на
-
чальный момент времени точка
С
≡
С
о
в системе
О
ξηζ
имеет коорди
-
наты
(0
,
0
, R
)
.
Рабочая неподвижная система координат
—
С
о
xyz
.
Рис
. 2.
Качение колеса
11
на сминае
-
мом пневматике
Система координат
C
p
x
c
y
c
z
c
по
-
ступательно перемещается относи
-
тельно системы
С
о
xyz
.
Оси
x
,
x
с
параллельны оси
О
ξ
,
оси
y
,
y
с
па
-
раллельны
О
η
,
а оси
z
,
z
с
парал
-
лельны
О
ζ
.
В начальный момент
времени
С
о
xyz
совпадает с
О
ξηζ
при
z
=
ζ
−
R
.
Система координат
C
р
x
1
y
1
z
1
жестко связана с корпусом
,
оси со
-
впадают с ее главными централь
-
ными осями инерции
.
Ось
С
p
х
1
лежит в продольной плоскости
симметрии корпуса
.
Угловое по
-
ложение
C
p
x
1
y
1
z
1
относительно
C
p
x
c
y
c
z
c
определяется углами Эй
-
лера
(
ψ, ϑ, γ
)
.
Положение
С
p
от
-
носительно
С
задают координаты
ISSN 0236-3933.
Вестник МГТУ им
.
Н
.
Э
.
Баумана
.
Сер
. “
Приборостроение
”. 2003.
№
4 105


