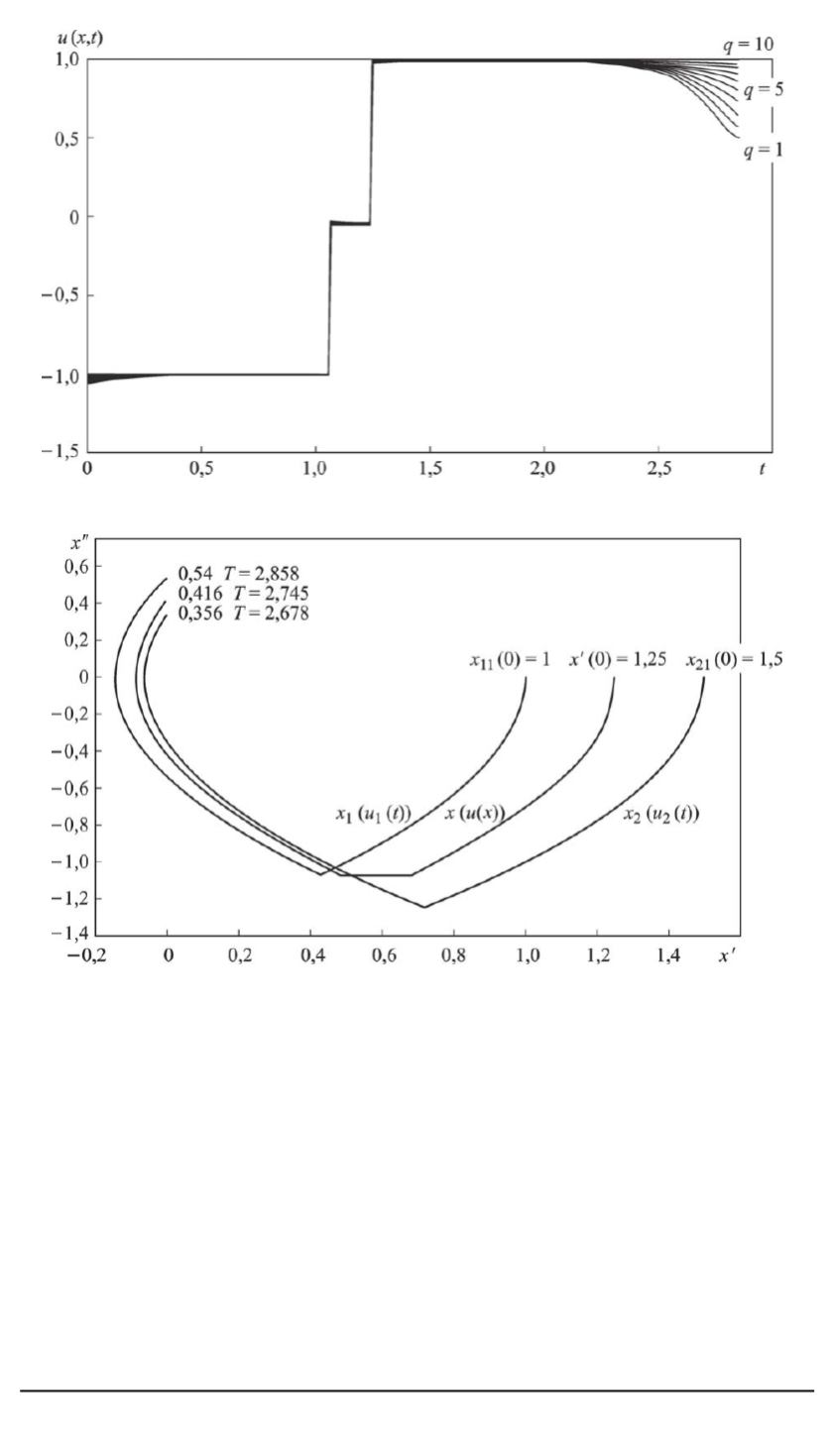
Рис. 4. Временная реализация
u
(
x, t
)
при
q
1
=
q
2
от 1 до 10
Рис. 5. Фазовые траектории
x
(
x
)
,
q
1
= 5
,
q
2
= 5
На рис. 5 показано, что траектория, соответствующая полученно-
му позиционному управлению, обеспечивает высокий уровень свойств
многокритериальной оптимальности на множестве начальных усло-
вий.
Приложение.
Для иллюстрации применения синергетического метода АКАР при
получении МПУ (7), которое является основой многокритериального
синтеза позиционного управления на отрезке
[
t
0
, t
k
]
, рассмотрим ли-
14 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 2


