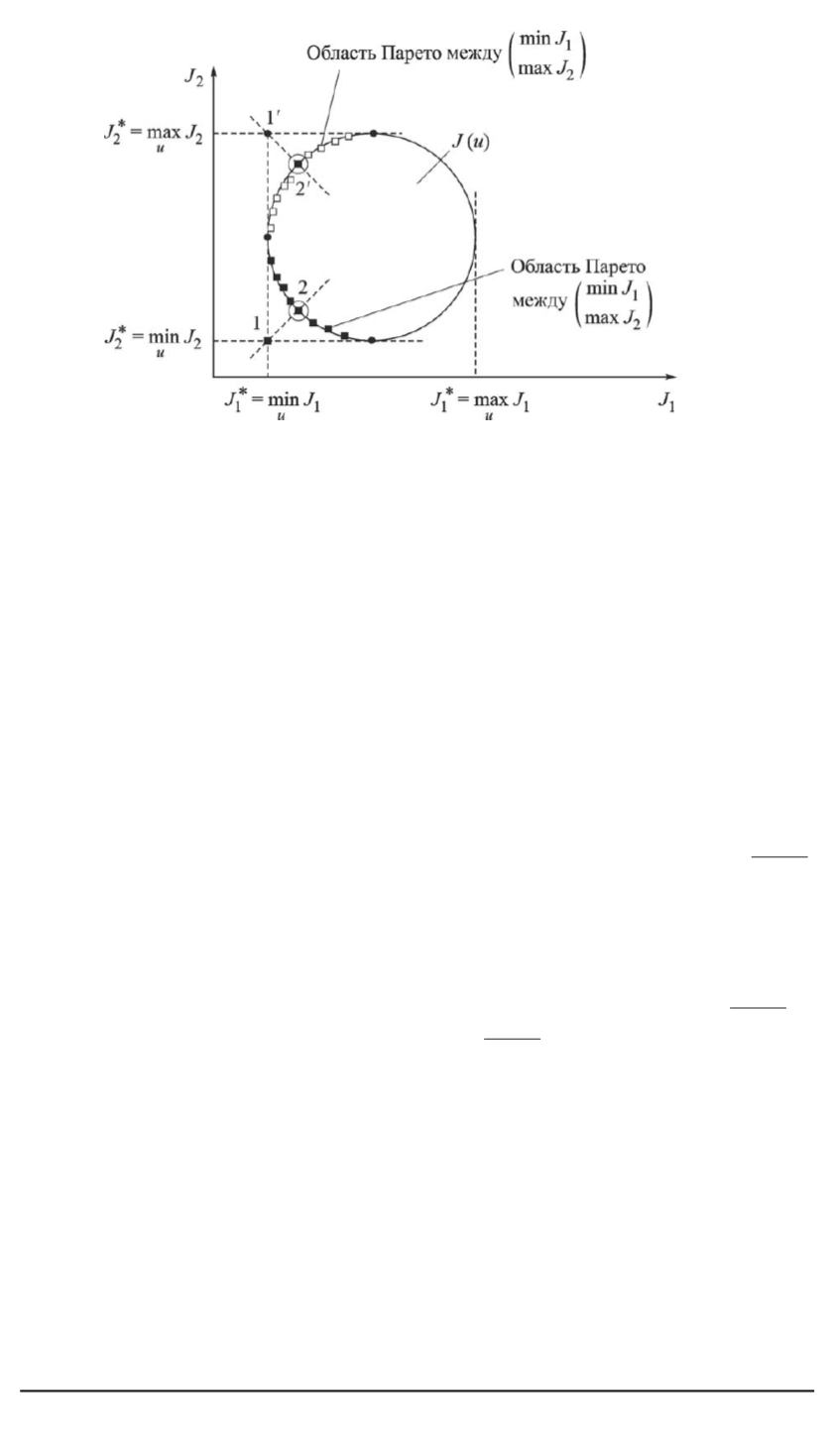
Рис. 1. Парето-область с точкой компромисса и учетом вариации постановки
при
l
=2
Применяя один из перечисленных подходов многокритериальной
программной оптимизации, можно получить множество из
N
решений
на множестве начальных условий. Для этого могут быть применены
прямые методы, методы скаляризации, а также методы на основе ком-
промиссов [11]. Пусть без ограничения выбора подходов это будет
один из методов получения компромиссов на основе идеальной точки,
который позволяет выбрать на области Парето точку, самую близкую
к идеальной точке, и потому обходит неопределенность выбора на
области Парето.
На рис. 1 точки 1 (1 ) — идеальные точки, а точки 2 (2 ) — искомое
решение (точки компромисса) по вектору показателей на области Па-
рето, которому при заданных начальных условиях
x
k
(
t
0
)
,
k
= 1
, N
,
соответствует оптимальное программное управление
u
k,
opt
при реше-
нии задачи на основе функции Салуквадзе [9]:
min[(
J
1
−
J
∗
1
)
2
+ (
J
2
−
J
∗
2
)
2
]
→
u
=
u
k,
opt
.
(3)
Окончательно получаем множество заданных
u
k,
opt
(
t
)
,
k
= 1
, N
, и
соответствующих траекторий
x
k
(
t
)
,
k
= 1
, N
.
3. В настоящее время в теории многопрограммного позиционного
управления (МПУ) в работах В.И. Зубова и Н.В. Смирнова [1–3] ре-
шена задача многопрограммной стабилизации для линейных стацио-
нарных и нестационарных систем, а также для некоторых нелинейных
систем:
билинейной системы
˙
x
=
A
(
t
) +
N
i
=1
B
i
(
t
)
u
i
x,
(4)
где
A
(
t
)
и
B
i
(
t
)
— матрицы размера
n
×
n
и
n
×
1
;
6 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2012. № 2


