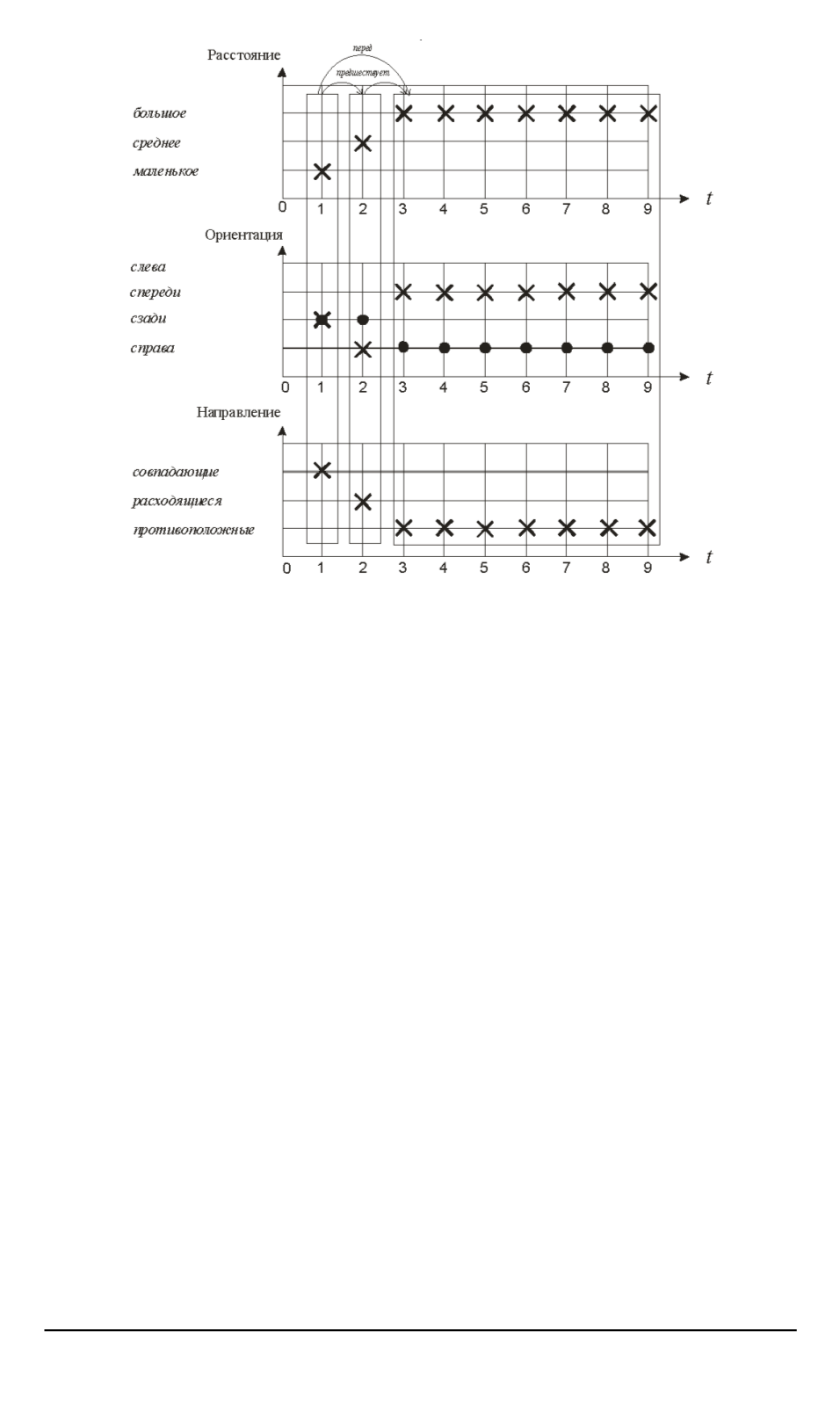
Рис. 11. Одинаковые макросрезы на макротрендах
Y
расстояние
,
ориентация
,
направление
[Θ
1
,
Θ
9
]
наковых макросрезов совокупность макротрендов
Y
расстояние
[Θ
1
,
Θ
9
]
,
Y
ориентация
[Θ
1
,
Θ
9
]
,
Y
направление
[Θ
1
,
Θ
9
]
можно представить как объеди-
нение потоков макросрезов, т.е.
Y
расстояние,ориентация,направление
[Θ
1
,
Θ
9
] =
=
Y
расстояние,ориентация,направление
[Θ
1
,
Θ
1
]
∪
∪
Y
расстояние,ориентация,направление
[Θ
2
,
Θ
2
]
∪
∪
Y
расстояние,ориентация,направление
[Θ
3
,
Θ
9
]
.
Разбиение макротрендов на интервалы с одинаковыми макросре-
зами так, как это показано на рис. 11, также позволяет представить
отношение
Y
расстояние,ориентация,направление
[Θ
1
,
Θ
9
]
для макротренда с ис-
пользованием интервального отношения
предшествует.
Введя все необходимые, на наш взгляд, понятия можно сформули-
ровать главные вопросы, на которые, используя введенные понятия,
будут даны ответы.
•
Какова должна быть модель, адекватно представляющая простран-
ственно-временные отношения объектов реального мира, требуемая
для распознавания возникающих в этом мире ситуаций?
•
Каковы должны быть процедуры распознавания этих ситуаций?
Иерархическая модель четких конечных автоматов.
Предста-
вим макротренд
Y
i
[Θ
t
s
,
Θ
t
e
] =
h
y
i
(Θ
t
s
)
, . . . , y
i
(Θ
t
e
)
i
конечным автома-
100 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3


