том
M
i
[Θ
t
s
,
Θ
t
e
]
следующим образом. Начальным внутренним состоя-
нием автомата будем считать состояние
b
i
(Θ
t
s
)
. Функциями переходов
f
и выходов
ϕ
конечного автомата
M
i
[Θ
t
s
,
Θ
t
e
]
будем считать
f
[
t, b
i
(Θ
t
)] =
b
i
(Θ
t
+Δ
)
, t
2
[
t
s
, t
e
−
Δ];
ϕ
[
b
i
(Θ
t
)] =
y
i
(Θ
t
)
.
Таким образом, вся информация о трендах и макротрендах, сре-
зах и макросрезах может быть представлена иерархией конечных
автоматов, начиная от автоматов, представляющих собой тренды
признаков первого уровня и заканчивая автоматами, представляю-
щими макротренды признаков самого верхнего уровня. Автоматы,
представляющие признаки уровня
u
, будем называть автоматами уров-
ня
u
. В случае необходимости указания уровня автомата
M
i
[Θ
t
s
,
Θ
t
e
]
автомат будем записывать как
M
u
i
[Θ
t
s
,
Θ
t
e
]
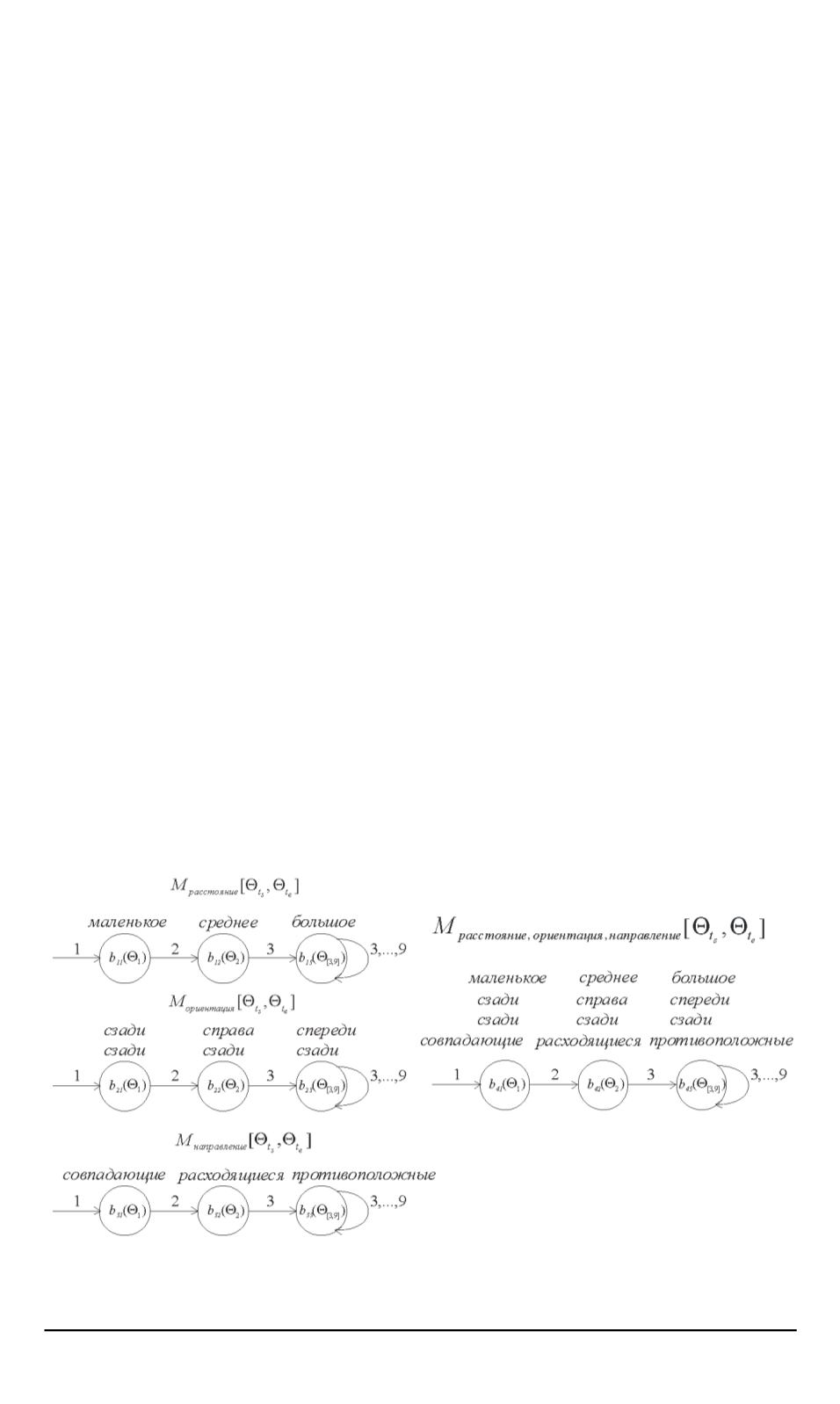
. Если представить авто-
маты графами переходов, то для рассмотренного примера будем иметь
два уровня автоматов (рис. 12):
M
1
расстояние
[Θ
t
s
,
Θ
t
e
]
, M
1
ориентация
[Θ
t
s
,
Θ
t
e
]
,
M
1
направление
[Θ
t
s
,
Θ
t
e
]
и
M
2
расстояние, ориентация, направление
[Θ
t
s
,
Θ
t
e
]
. Построе-
ние автоматов начинается с первого уровня по трендам отсчетов
первого уровня. Каждый автомат некоторого уровня
u >
0
предста-
вляет собой динамику изменения отношений между отношениями,
представляемыми автоматами предыдущих уровней. Будем полагать,
что все автоматы
M
u
k
u
одного и того же уровня уровня
u
= 0
, . . .
про-
индексированы от 1 до
l
u
, т.е. каждый автомат
M
u
k
u
имеет уникальный
номер
k
u
2 {
1
, . . . , l
u
}
.
Источником трендов является либо эксперт, либо реальная физи-
ческая среда (мир), либо их комбинация. Поведение этих миров мо-
жет описываться и непосредственно четкими конечными автоматами,
Рис. 12. Автоматы
M
расстояние
[Θ
t
s
,
Θ
t
e
]
,
M
ориентация
[Θ
t
s
,
Θ
t
e
]
,
M
направление
[Θ
t
s
,
Θ
t
e
]
,
M
расстояние
,
ориентация
,
направление
[Θ
t
s
,
Θ
t
e
]
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3 101


