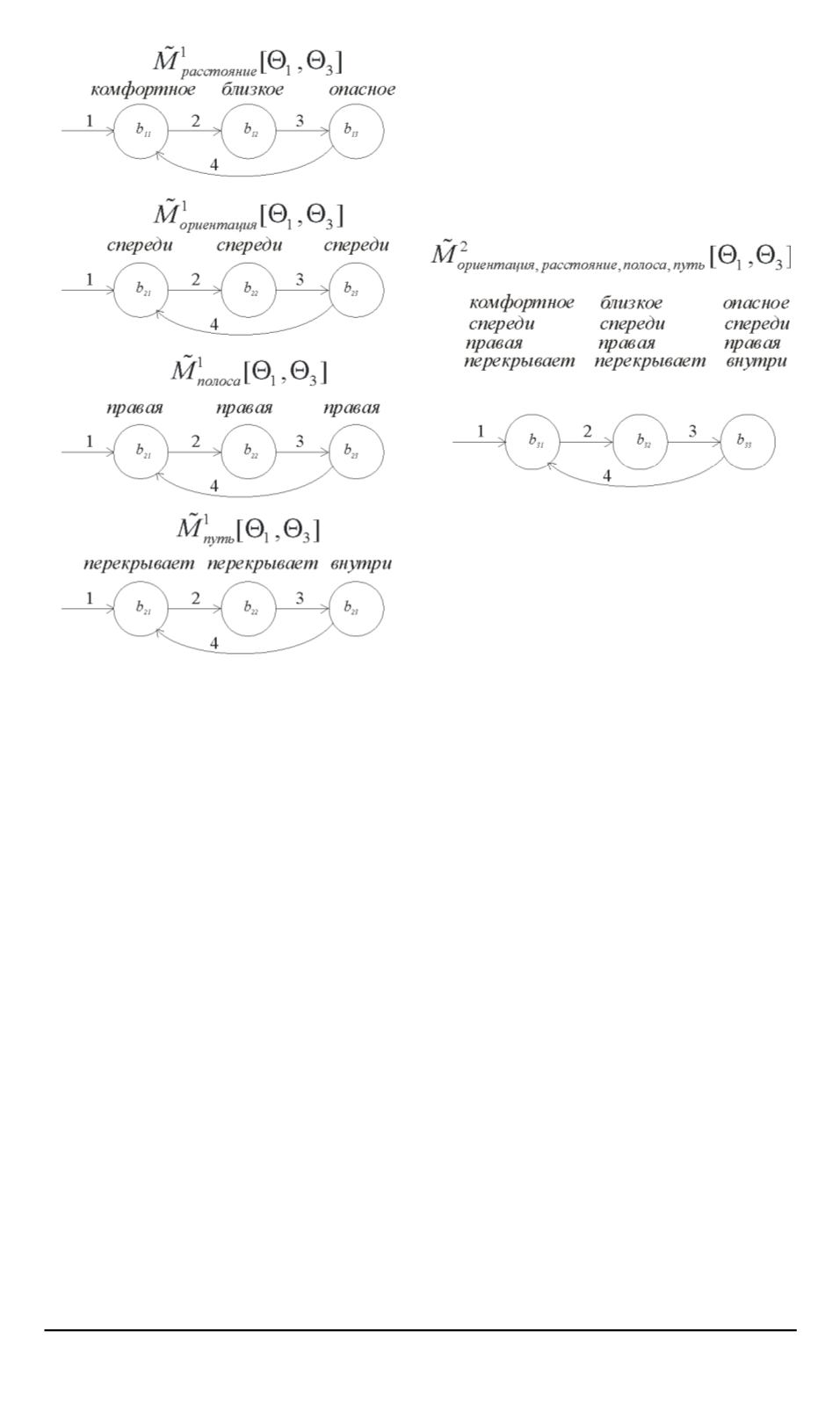
Рис. 23. Нечеткие автоматы
˜
M
1
расстояние
[Θ
1
,
Θ
3
]
,
˜
M
1
ориентация
[Θ
1
,
Θ
3
]
˜
,
˜
M
1
полоса
[Θ
1
,
Θ
3
]
,
˜
M
1
путь
[Θ
1
,
Θ
3
]
путь
,
˜
M
2
ориентация
,
расстояние
,
полоса
,
путь
[Θ
1
,
Θ
3
]
˜
трендах линейно). Для многих сред это может быть неадекватно и не-
удобно, может оказаться, что нелинейные (ветвящиеся тренды) более
адекватно описывают среду. Автоматы в этом случае могут быть неде-
терминированными, потребуется модификация предложенного метода
как в части построения автоматов, так и в части их использования.
•
Любой автомат может быть представлен не только в форме графа,
но и в виде множества правил или уравнений специального вида.
Это потребует модификации предложенного метода применительно к
такому представлению.
•
В настоящей работе использован так называемый монотонный
вывод, предполагающий, что автоматы остаются неизменными в про-
цессе распознавания, а следовательно, остаются неизменными и все
допустимые отношения, определяемые этими автоматами. Для многих
сред монотонный вывод неадекватен. Отношения со временем могут
изменяться. Это также требует модификации предложенного метода.
•
Автоматное представление пространственно-временных отноше-
ний требует разработки визуальных средств интеллектуального ин-
терфейса как для задания автоматов, так и для интерпретации для
пользователя результатов распознавания.
110 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3


