Рис. 21. Макротренд
Y
путь
[Θ
1
,
Θ
3
]
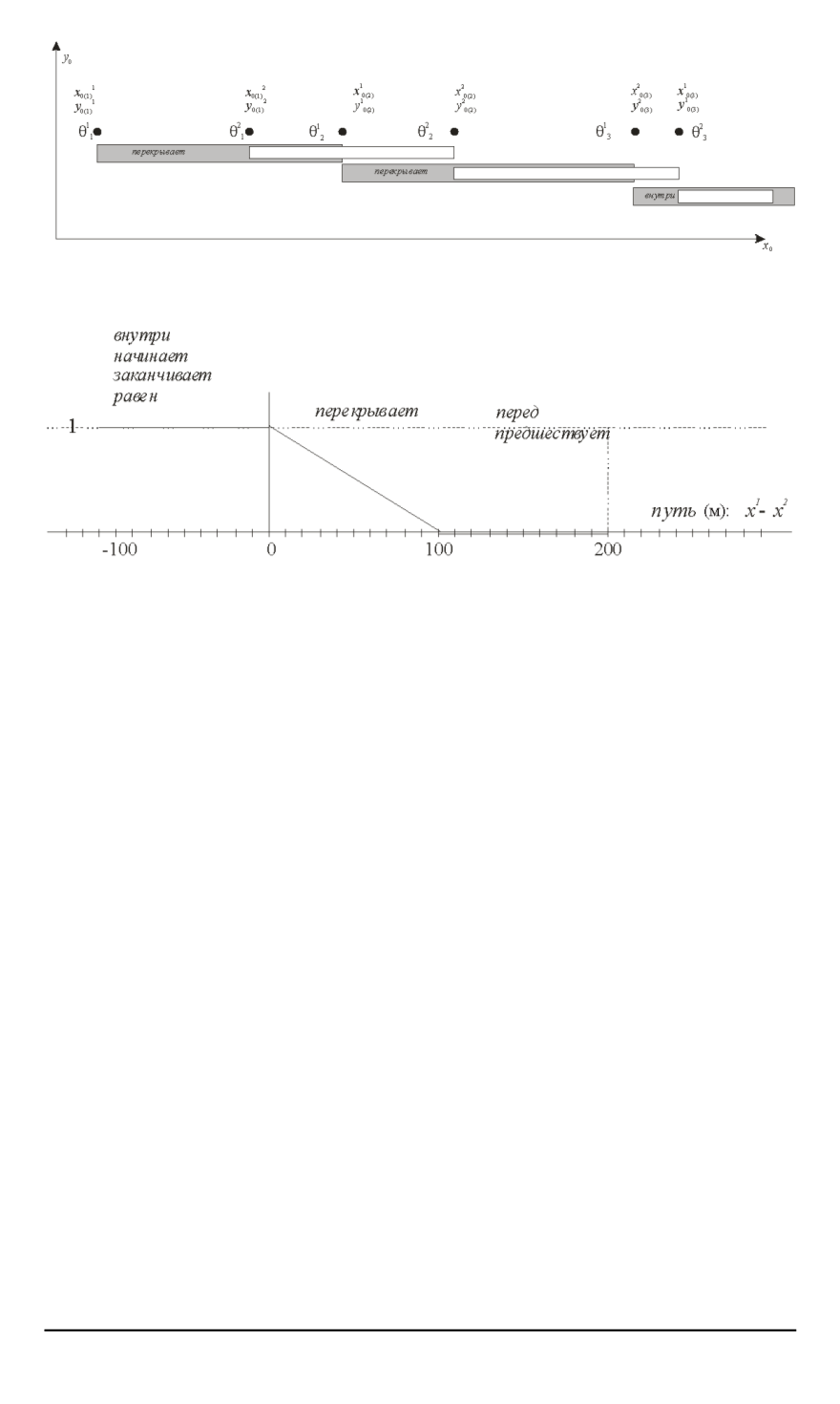
Рис. 22. Нечеткое множество, соответствующие значениям отношения
путь
Универсум для совокупного отношения ориентации, расстояния,
полосы и пути — это наборы этих отношений, показанные на рис. 23
автомата
˜
M
2
ориентация,расстояние, полоса, путь
[Θ
1
,
Θ
3
]
, а функция принадлеж-
ности для них находится агрегированием отдельных функций при-
надлежности для отношений ориентации, расстояния, полосы и пути
(например, так, как это делается в работе [21]).
Заключение
. Представлен новый подход к пространственно-
временным рассуждениям в целях распознавания ситуаций, возни-
кающих в процессе динамического изменения отношений между
объектами какой-либо среды. Пространственно-временные отноше-
ния задаются иерархически организованными совокупностями четких
или нечетких конечных автоматов. Эти совокупности автоматов ис-
пользуются для вычисления пространственно-временных отношений.
Результаты экспериментов показали, что предлагаемый метод надежно
работает при распознавании различных ситуаций, требует сравнитель-
но малых затрат ресурсов времени и памяти, позволяет достаточно
естественно, а главное, без длительного периода обучения описывать
иерархию нечетких пространственно-временных отношений.
Многое еще предстоит сделать как в теоретическом, так приклад-
ном плане. Вот только некоторые из задач, которые предстоит рассмо-
треть.
•
В настоящей работе рассматривались только автоматы, для по-
строения которых использовались линейные тренды (время в этих
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2011. № 3 109


