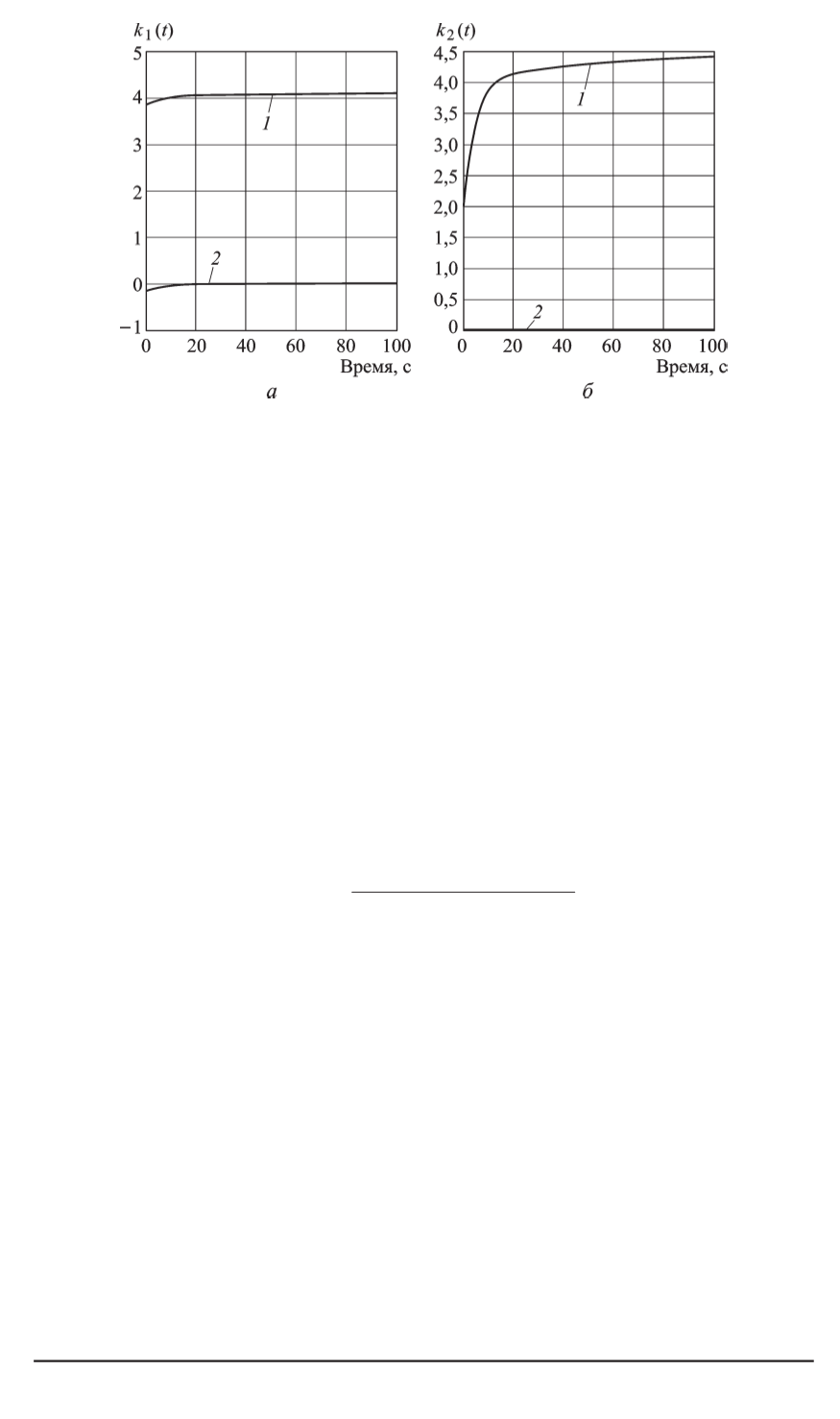
Рис. 9. Нестационарные коэффициенты регулятора и их дифференциальные
части:
1
—
k
1
(
t
)
;
2
—
a
(
t
)
/b
(
t
)
рых затруднительно при полном знании параметров и невозможно в
условиях отсутствия полной априорной информации о переменных
параметрах модели объекта управления. Поэтому при заданных пара-
метрах (3) можно пренебречь в зависимостях (9) слагаемыми
˙
b
(
t
)
/b
(
t
)
и
˙
a
(
t
)
/b
(
t
)
, включающими в себя производные параметров объекта,
ввиду их малости по сравнению с другими слагаемыми, что наглядно
видно из рис. 9.
Таким образом, нестационарные коэффициенты
k
1
(
t
)
и
k
2
(
t
)
полу-
ченного регулятора (9) будут изменяться по приближенным (и более
простым) нелинейным зависимостям вида
k
1
(
t
) =
a
(
t
)
−
2
s
0
;
k
2
(
t
) =
s
2
0
+ [
a
(
t
)
−
2
s
0
]
a
(
t
)
b
(
t
)
.
(10)
Такое приближение закона управления (9) вносит пренебрежимо
малое изменение в функционирование замкнутой системы при дей-
ствии на нее внешнего возмущения
d
, когда применятся регулятор (10).
Разрешение параметрической неопределенности.
Для разреше-
ния параметрической неопределенности в модели объекта необходимо
восстановить нестационарные параметры по известным данным. Па-
раметры объекта
a
(
t
)
и
b
(
t
)
известны только в семи равноудаленных
друг от друга точках на отрезке времени от 0 до 100 с. В данном слу-
чае используется линейная интерполяция заранее рассчитанных по
формулам (10) значений нестационарных коэффициентов в моменты
времени, когда параметры
a
(
t
)
и
b
(
t
)
известны. Этот подход приводит
к кусочно-линейному регулятору
u
=
−
K
(
t
) [
x
1
x
2
]
T
, K
(
t
) =
α
(
t
)
K
i
+
β
(
t
)
K
i
+1
,
(11)
76 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4


