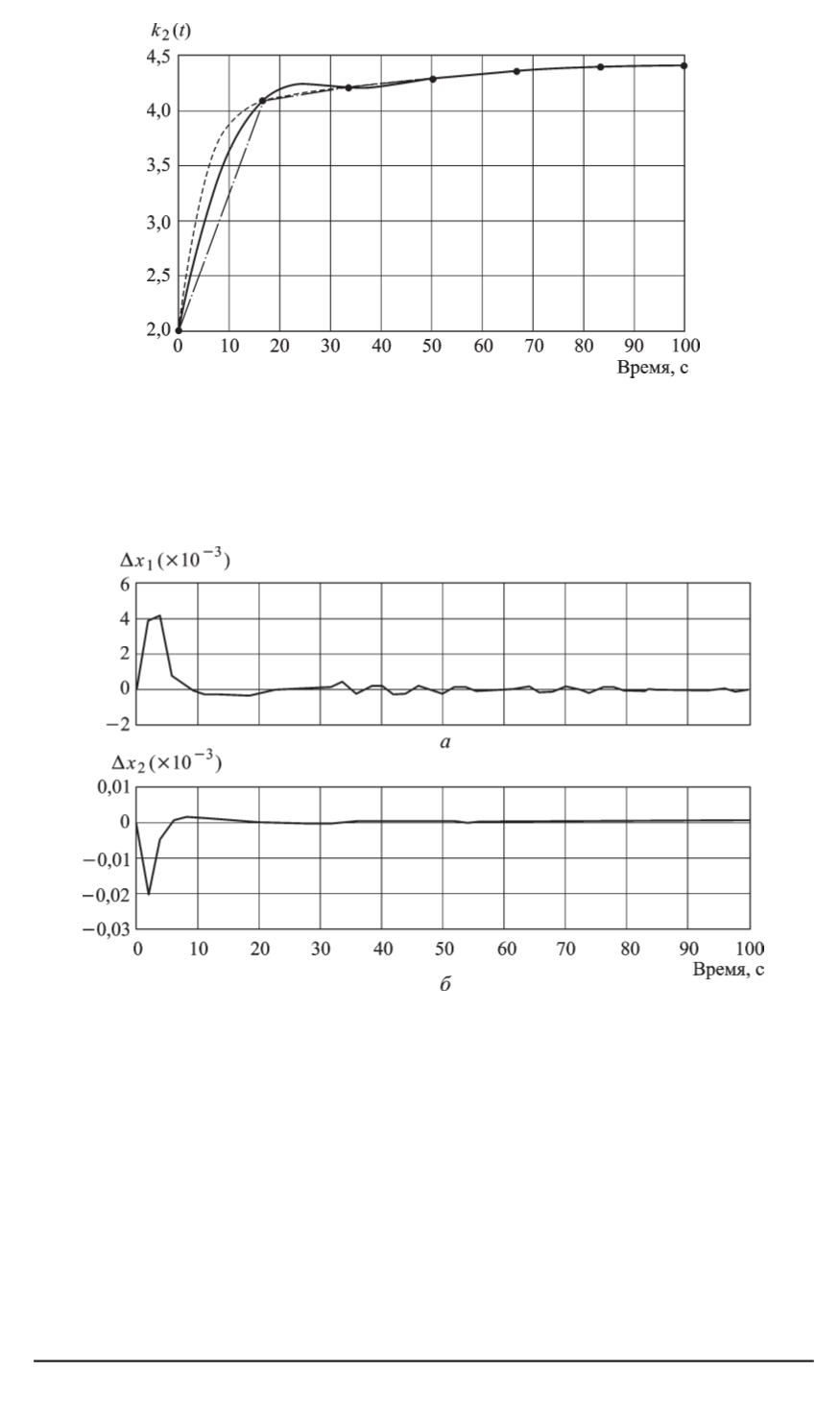
Рис. 12. Переменный коэффициент регулятора
k
2
(
t
)
при разных способах ин-
терполяции:
штриховая кривая — без неопределенности в модели объекта; штрих-пунктирная —
при кусочно-линейной интерполяции; сплошная — при интерполяции кубическими
сплайнами; точки — известные данные при неопределенности
Рис. 13. Разность сигналов систем
x
1
(
а
) и
x
2
(
б
) при интерполяции с помощью
кубических сплайнов
лучить известным методом редукции с использованием внутренне-
го балансирования линейных дифференциальных уравнений линеари-
зованной системы с назначением порядка редукции по ганкелевым
сингулярным числам [10]. Результат редукции уравнений вида (1) за-
ключается в переходе от системы 130-го порядка, с учетом моделей
исполнительных устройств и выходного фильтра, к редуцированной
системе порядка 30, содержащей одну неустойчивую моду вертикаль-
ного движения плазмы [1].
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4 79


