где
K
(
t
) = [
k
1
(
t
)
k
2
(
t
)]
,
K
i
= [
k
1
,i
k
2
,i
]
,
i
= 0
,
1
, . . . ,
6
. Коэффициенты
α
(
t
)
и
β
(
t
)
удовлетворяют условию
α
(
t
) +
β
(
t
) = 1
, t
∈
[
t
i
, t
i
+1
]
(12)
и обеспечивают на заданном интервале линейную интерполяцию. Вре-
мя работы системы разбивается на 6 интервалов, на концах которых (в
узлах интерполяции) известны значения нестационарных параметров.
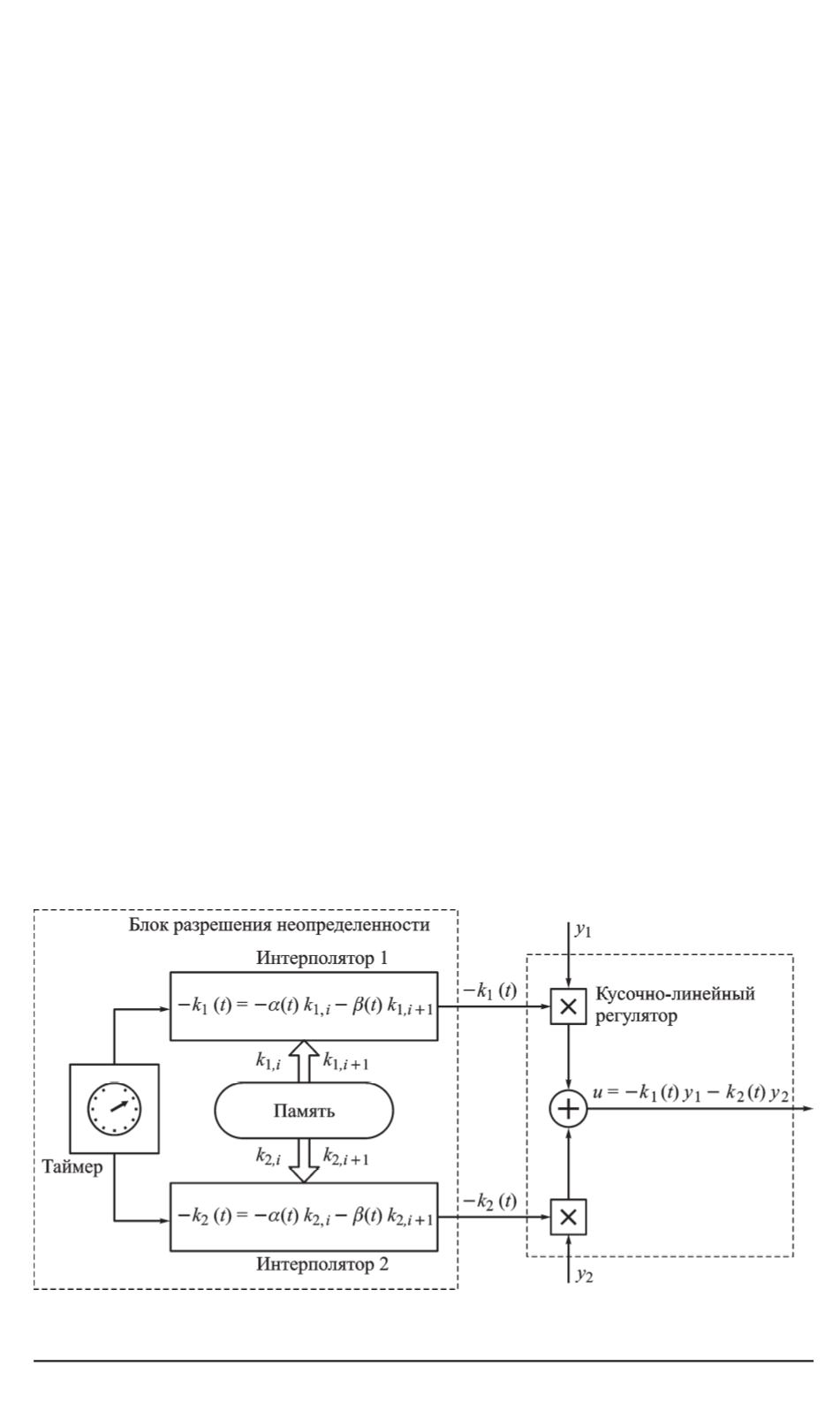
Для реализации интерполирующего регулятора (11) и (12) необ-
ходим блок памяти, в котором будут храниться заранее рассчитанные
значения нестационарных коэффициентов
k
1
,i
и
k
2
,i
в заданные мо-
менты времени. Также необходим таймер для определения интервала
времени
[
t
i
, t
i
+1
]
, для которого происходит интерполяция. В результа-
те интерполирующий регулятор будет состоять из последовательного
соединения двух блоков: блока разрешения неопределенности и бло-
ка формирования входа объекта управления, представляющего собой
блок кусочно-линейного регулятора (рис. 10). В интерполяторах
1
и
2
блока разрешения неопределенности реализуются коэффициенты ре-
гулятора с помощью таймера и запомненных значений
k
1
,i
и
k
2
,i
с
учетом условия (12) по следующим кусочно-линейным зависимостям:
k
1
(
t
) =
α
(
t
)
k
1
,i
+
β
(
t
)
k
1
,i
+1
;
k
2
(
t
) =
α
(
t
)
k
2
,i
+
β
(
t
)
k
2
,i
+1
.
Для оценки точности интерполяции рассматриваются разности
сигналов
x
1
и
x
2
идеальной системы (без неопределенности) и систе-
мы с неопределенностью
Δ
x
i
=
x
ideal
i
−
x
uncertain
i
, i
= 1
,
2
.
При линейной интерполяции эти разности составляют 4% для сигнала
Рис. 10. Структурная схема интерполирующего регулятора
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4 77


