скольку стационарная часть системы устойчива, а нестационарность
заключается только в переменном выходном коэффициенте усиления
модели системы в координатах “возмущение – выход”. Это подтвер-
ждается реакцией системы на импульс
d
2
(рис. 7,
б
) и всплеск с экспо-
ненциальным спадом
d
3
(рис. 7,
в
).
Замкнутая система ведет себя при переходном процессе как ста-
ционарная лишь для выходного сигнала
y
2
, поскольку уравнение (6)
записано относительно состояния
x
2
. Сигнал
y
1
при этом описывает-
ся нестационарным уравнением при синтезированном регуляторе (9),
так как зависимости (9), полученные из уравнения (6), в общем случае
не превращают нестационарные коэффициенты уравнения (7) в кон-
станты. Система является внутренне устойчивой, что видно из ее схо-
дящихся (затухающих) переходных процессов по обоим состояниям
модели объекта:
x
1
, x
2
. При этом состояние
x
1
, соответствующее то-
ку в магнитной катушке (или индукции магнитного поля), по-разному
реагирует на возмущения в разные моменты времени (см. рис. 6,
а
,
рис. 8), поскольку коэффициенты уравнения (7) изменяются во време-
ни и не стабилизируются регулятором (9), делающим постоянными во
времени только коэффициенты уравнения (6). Переходные процессы
по
x
1
и
x
2
приводят не к нулю, а к соответствующей точке траектории
установившегося движения, так как в уравнениях (6) и (7) остаются
нестационарные параметры.
Однако это свойство не нарушает работоспособности системы, так
как на это состояние не накладывается жестких ограничений, и упра-
вление им в данной задаче не требуется, поскольку целенаправленному
воздействию подвергается выходная величина системы
y
2
=
x
2
+
d
.
В формуле (9) коэффициентов полученного регулятора содержатся
производные параметров модели объекта, точное вычисление кото-
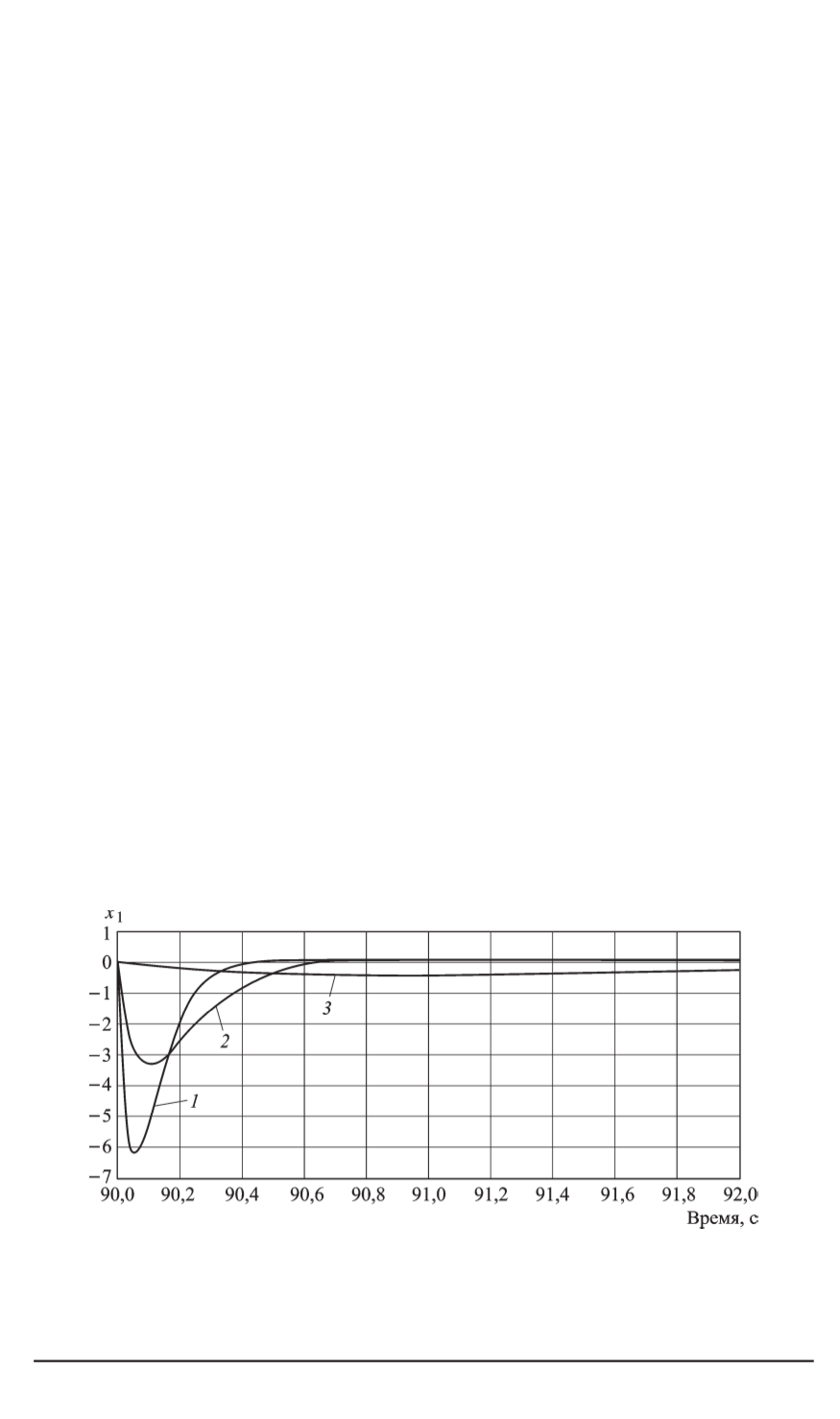
Рис. 8. Переходный процесс в состоянии
x
1
при различных значениях полюса
s
0
в момент времени 90 с при возмущении в виде ступенчатой функции (кривые
1, 2
и
3
— см. рис. 6)
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4 75


