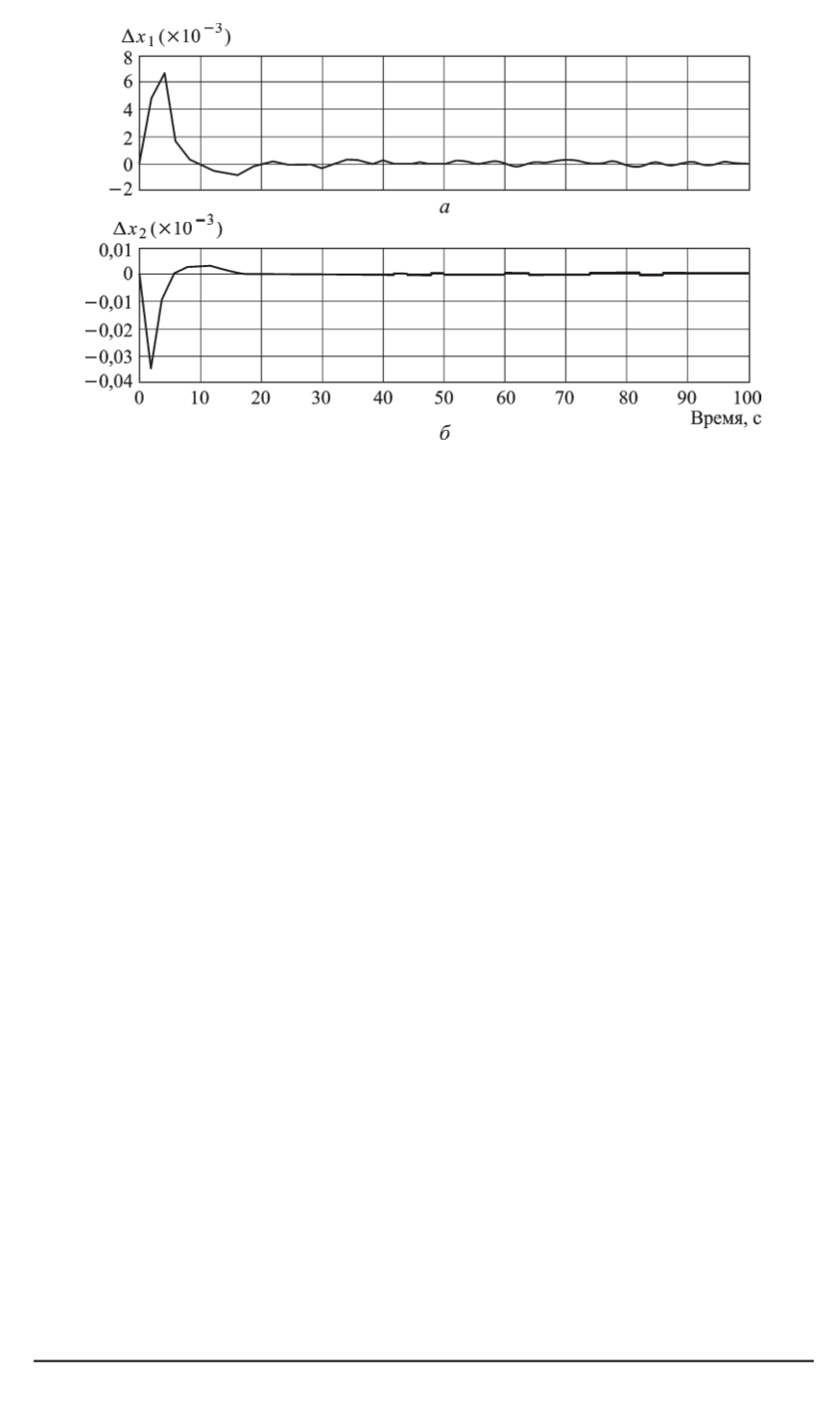
Рис. 11. Разность сигналов систем при линейной интерполяции
x
2
(
а
) и
x
1
(
б
)
x
2
и 0,26% для сигнала
x
1
. Изменение во времени разностей
Δ
x
i
показано на рис. 11.
Интерполяция параметров с помощью кубических сплайнов.
В целях повышения точности для интерполяции параметров
k
1
(
t
)
и
k
2
(
t
)
применяются кубические сплайны [9]. Кубический сплайн пред-
ставляет собой гладкую кусочно-полиномиальную функцию третьего
порядка.
Интерполяция кубическими сплайнами является более качествен-
ной, чем кусочно-линейная, так как в ней используются функции более
высокого порядка. Они имеют ненулевую вторую производную, вслед-
ствие чего дают более точное приближение интерполируемой функции
между узловыми точками. Однако наличие ненулевой второй произ-
водной не всегда приводит к лучшему результату. Например, из рис. 12
видно, что на первом интервале (0. . . 16,7 с) интерполяция сплайна-
ми точнее приближает коэффициент
k
2
(
t
)
, чем кусочно-линейная, а
на втором интервале (16,7. . . 33,3 с) кусочно-линейная интерполяция
оказывается точнее.
Применение кубических сплайнов для интерполяции неопределен-
ных параметров по известным значениям в узловых точках уменьшает
отличие от идеальной системы в сигнале
x
2
до 2 % и до 0,15% в сиг-
нале
x
1
(рис. 13).
Точность идентификации и управления.
Синтез нестационар-
ного нелинейного регулятора осуществлен для модели объекта упра-
вления предельно низкого порядка, а именно второго порядка. Такая
модель получена методом идентификации по накопленным данным
плазмо-физического кода ДИНА с достаточно высокой точностью ап-
проксимации. Аналогичную модель второго порядка не удалось по-
78 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4


