Степень неопределенности полученных при идентификации значе-
ний параметров не оценивалась, для получения модели поведения вер-
тикальной скорости плазмы эти значения считаются точно известными
в заданных точках, а между точками предполагается отсутствие вспле-
сков (флуктуаций) параметров. Управление нестационарными объек-
тами представляет собой гораздо более сложную задачу, чем упра-
вление объектами с постоянными параметрами [7]. Поэтому задавать
желаемую динамику замкнутой системы управления целесообразно
посредством нестационарных регуляторов. Для этого в статье ставит-
ся и решается следующая задача.
Необходимо синтезировать регулятор в отрицательной обратной
связи, обеспечивающий
стабилизацию выходного сигнала
замкнутой
системы (вертикальной скорости плазмы) около нулевого значения при
действии возмущений типа малых срывов в токамаке,
стабилизацию
коэффициентов дифференциального уравнения замкнутой системы
и
возможность получения желаемых значений полюсов стационарной
системы в условиях отсутствия полной априорной информации о пе-
ременных параметрах модели объекта управления.
Такая задача применительно к управлению вертикальной скоро-
стью плазмы на стадии ввода плазменного тока в токамаках с вытяну-
тым по вертикали поперечным сечением ставится и решается впервые.
Синтез нестационарного нелинейного регулятора.
Для решения
поставленной задачи вначале рассмотрим случай, когда переменные
параметры модели полностью известны:
a
(
t
) = 0
,
1 sin(2
t/
400)
, b
(
t
) = 1 + exp(
−
0
,
3
t
)
.
(3)
Для модели объекта (2) синтезируется нестационарный регулятор
с законом управления по состоянию в отсутствие выходного возмуще-
ния
d
в виде
u
=
−
[
k
1
(
t
)
k
2
(
t
)] [
x
1
x
2
]
T
.
(4)
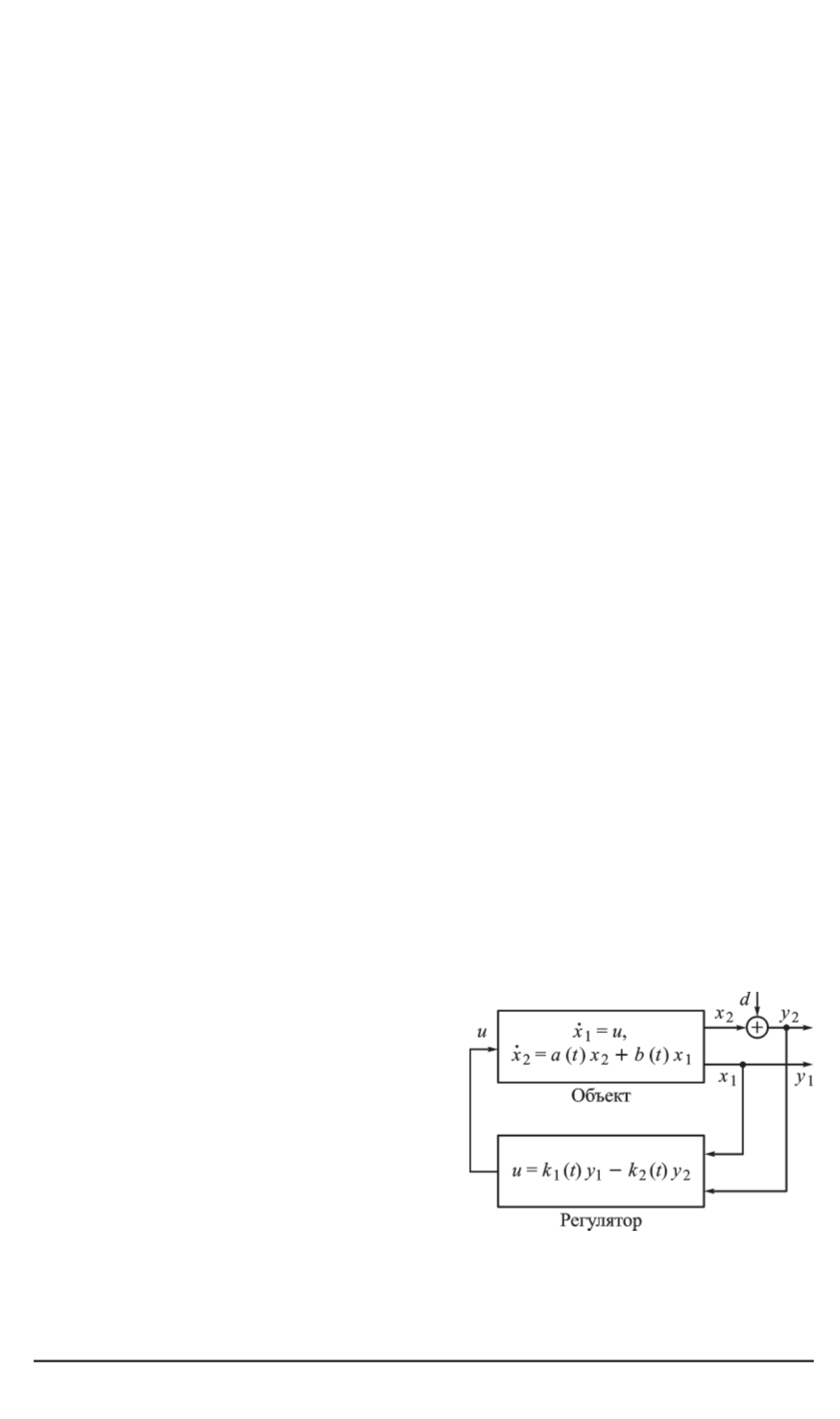
Рис. 3. Замкнутая система управле-
ния без неопределенности в пара-
метрах модели объекта
Тогда замкнутая система (рис. 3) с
учетом возмущения
d
на выходе мо-
дели объекта будет описываться диф-
ференциальными уравнениями вида:
˙
x
1
=
−
k
2
(
t
) (
x
2
+
d
)
−
k
1
(
t
)
x
1
;
˙
x
2
=
a
(
t
)
x
2
+
b
(
t
)
x
1
.
(5)
Перейдем от системы (5) к одно-
му дифференциальному уравнению
второго порядка, коэффициенты ко-
торого необходимо стабилизировать.
Можно получить два совершенно
ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4 71


