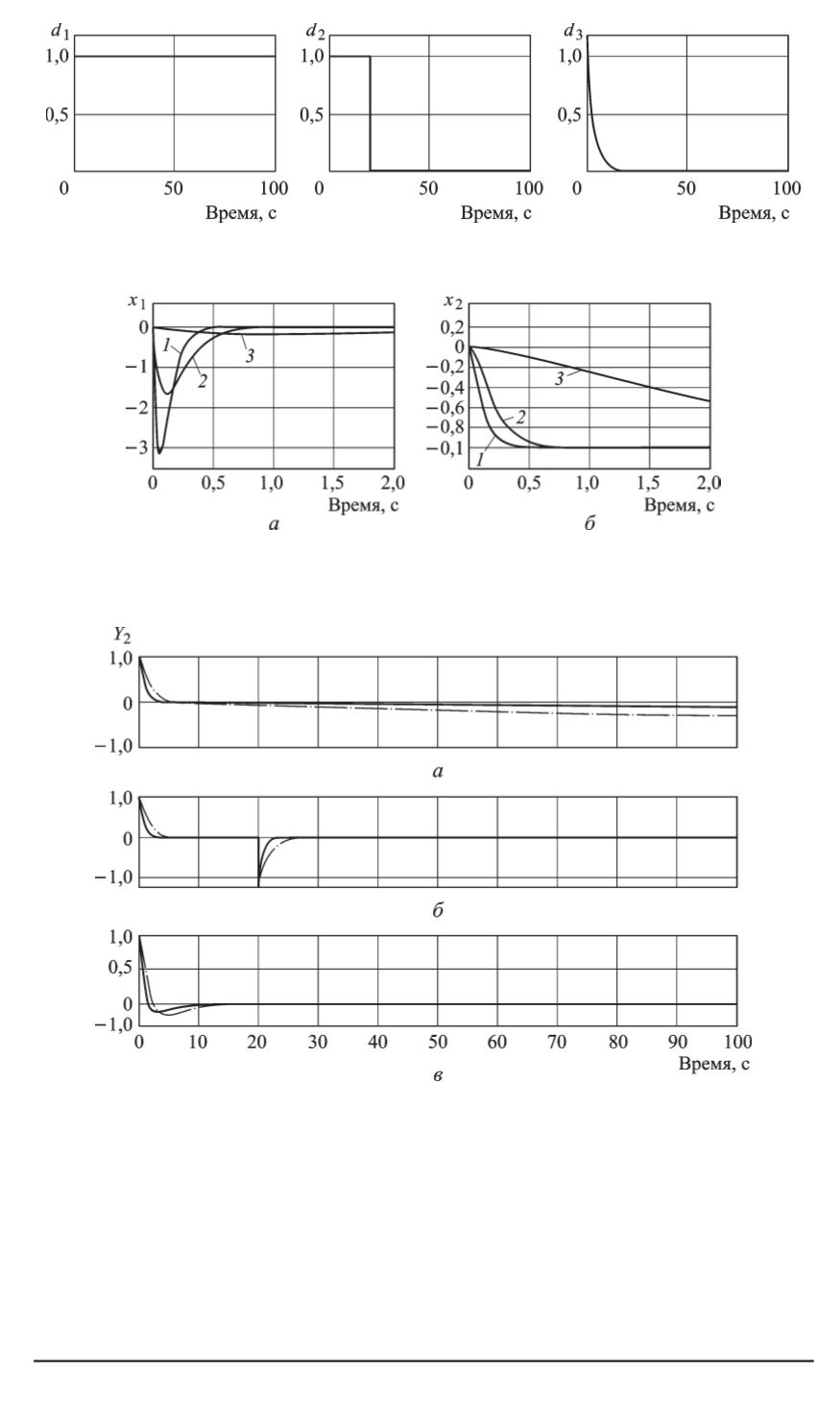
Рис. 5. Используемые возмущающие воздействия
Рис. 6. Переходные процессы в замкнутой системе при различных значениях
кратного полюса
s
0
=
−
1
(
1
), – 9 (
2
), – 17 (
3
) для состояний
x
1
(
а
) и
x
2
(
б
)
Рис. 7. Выходные сигналы замкнутой системы при возмущающих воздействиях
в виде ступенчатой функции (
а
), импульса (
б
) и всплеска с экспоненциальным
спадом (
в
):
штрих-пунктирная кривая —
s
0
=
−
1
; сплошная кривая —
s
0
=
−
2
в контуре управления по возмущению отсутствует астатизм, а коэффи-
циент усиления на выходе объекта изменяется во времени (см. рис. 4).
Однако при действии ограниченного во времени возмущения, каким
является модель малого срыва, выходной сигнал приходит к нулю, по-
74 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4


