Аналогичные результаты были получены при аппроксимации не-
линейной модели с распределенными параметрами горизонтального
движения плазмы в токамаке при малых отклонениях от положения
равновесия линейным динамическим звеном второго порядка ори-
гинальным методом проектирования интегральных кривых исходно-
го уравнения вдоль оси времени на фазовую плоскость “горизон-
тальное смещение плазмы–ток в обмотке вертикального магнитного
поля” [6].
Для моделирования, исследования и доказательства работоспособ-
ности разрабатываемого нестационарного регулятора в замкнутой си-
стеме управления было принято следующее предположение: параме-
тры модели объекта в ряде моментов времени — известны в резуль-
тате проведенной идентификации [4, 5]. Это позволяет, во-первых,
провести синтез регулятора с переменными параметрами, исходя из
условия полного знания параметров нестационарной модели объекта,
во-вторых, оценить качество разрешения параметрической неопреде-
ленности для используемого метода синтеза регулятора.
Постановка задачи.
Модель объекта управления описывается не-
устойчивой системой дифференциальных уравнений второго порядка
с переменными параметрами при доступных для измерения состояни-
ях
x
1
и
x
2
:
˙
x
1
=
u,
˙
x
2
=
a
(
t
)
x
2
+
b
(
t
)
x
1
,
(2)
где
x
1
,
x
2
,
u
∈
R
;
t
∈
R
+
; входная переменная
u
соответствуют напря-
жению на катушке управления; переменная
x
1
— току в катушке упра-
вления; переменная
x
2
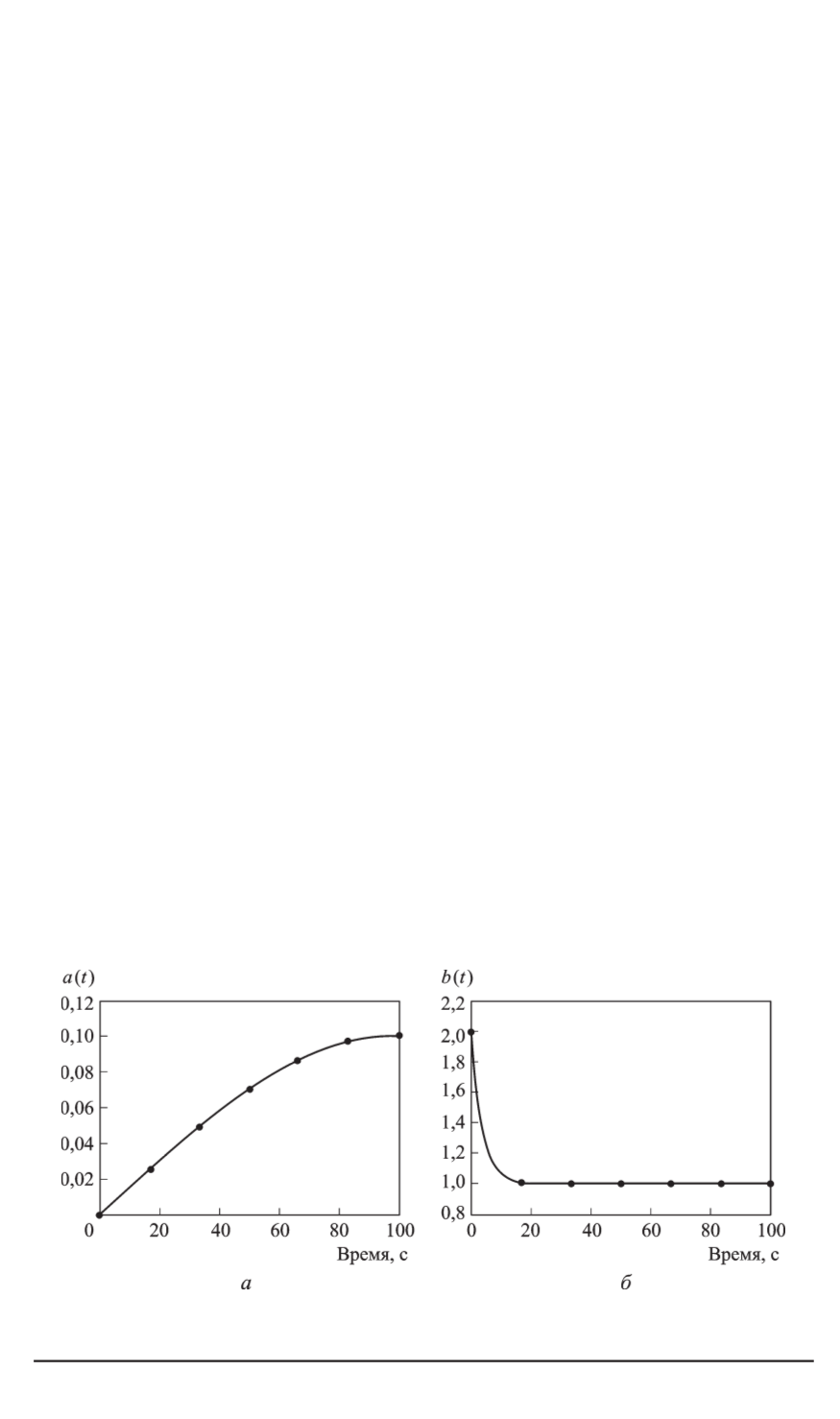
— вертикальной скорости плазмы. Параметры
a
(
t
)
и
b
(
t
)
считаются известными только в семи равноудаленных друг
от друга точках
t
i
, отмеченных на рис. 2, для которых были построены
линейные модели и проведена идентификация на отрезке времени от
0 до 100 с.
Рис. 2. Нестационарные параметры модели объекта:
a
(
t
)
(
а
) и
b
(
t
)
(
б
)
70 ISSN 0236-3933. Вестник МГТУ им. Н.Э. Баумана. Сер. “Приборостроение”. 2009. № 4


